MIT 深度学习与自动驾驶课程发布最新场景分割教程
【导读】MIT自动驾驶课程分享该课程下半部分的两节课程的相关信息和代码,包括 Deep Traffic 和 Driving Scene Segmentation,同时提供ipynb代码以供学习。课程视频和PPT暂时没有放出,后续专知会持续跟进。

实践项目介绍
Deep Traffic
DeepTraffic是一项深度强化学习竞赛。目标是创建一个神经网络去控制一辆或多辆汽车通过密集的公路交通。下面的视频就是竞赛的界面。
https://selfdrivingcars.mit.edu/deeptraffic
https://arxiv.org/abs/1801.02805
SegFuse
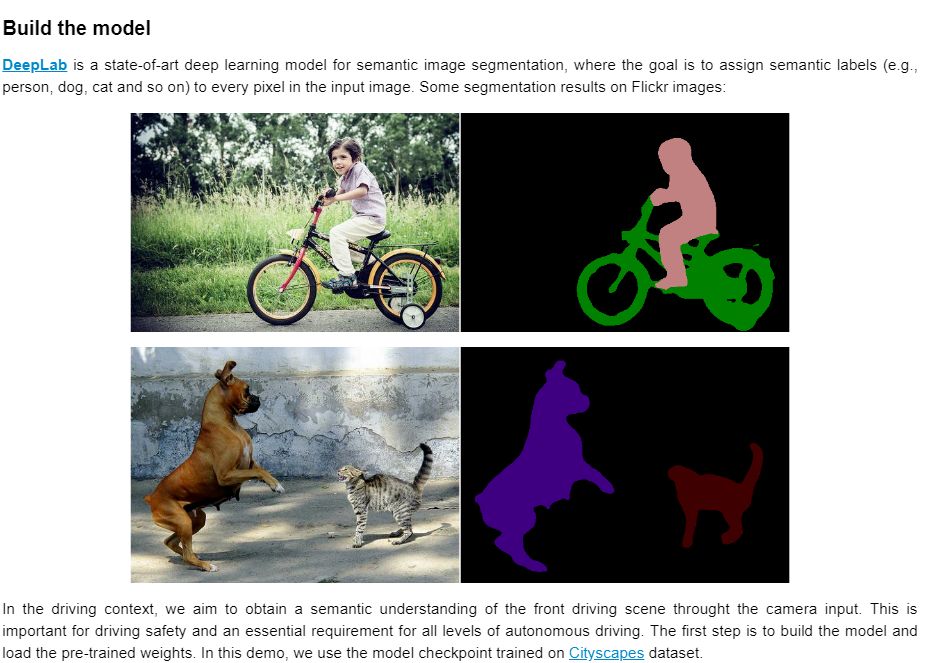
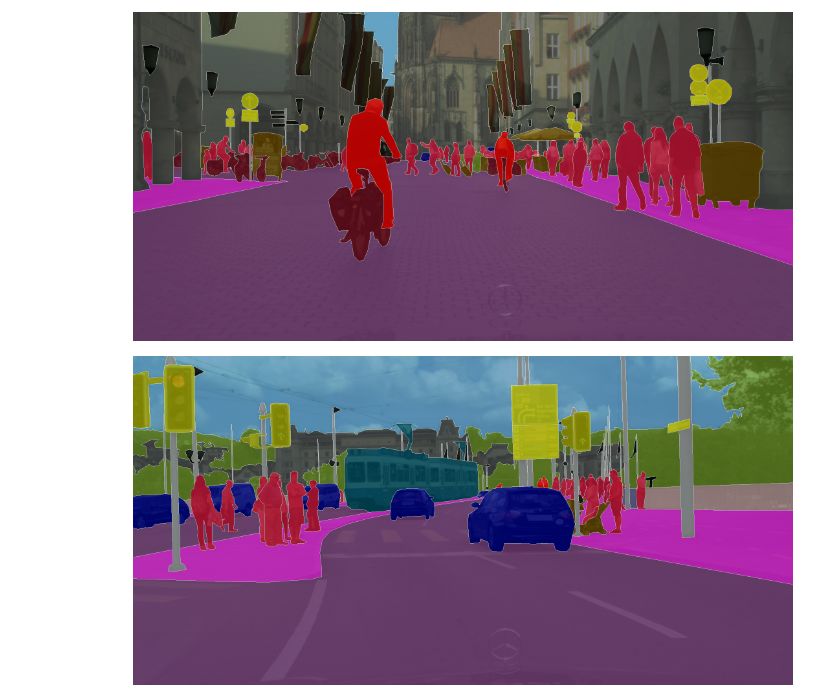
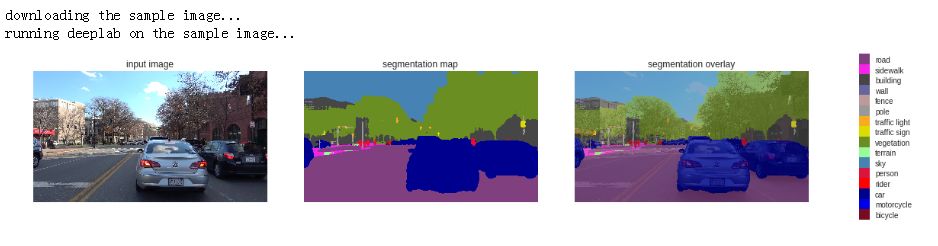
SegFuse是一个语义视频场景分割竞赛,旨在找到利用时间信息来帮助改善驾驶场景感知。给定一个带有相应驾驶状态数据的前方驾驶场景视频,需要参赛者把各种信息融合在一起建立一个动态感知模型。

https://github.com/lexfridman/mit-deep-learning/blob/master/tutorial_driving_scene_segmentation/tutorial_driving_scene_segmentation.ipynb
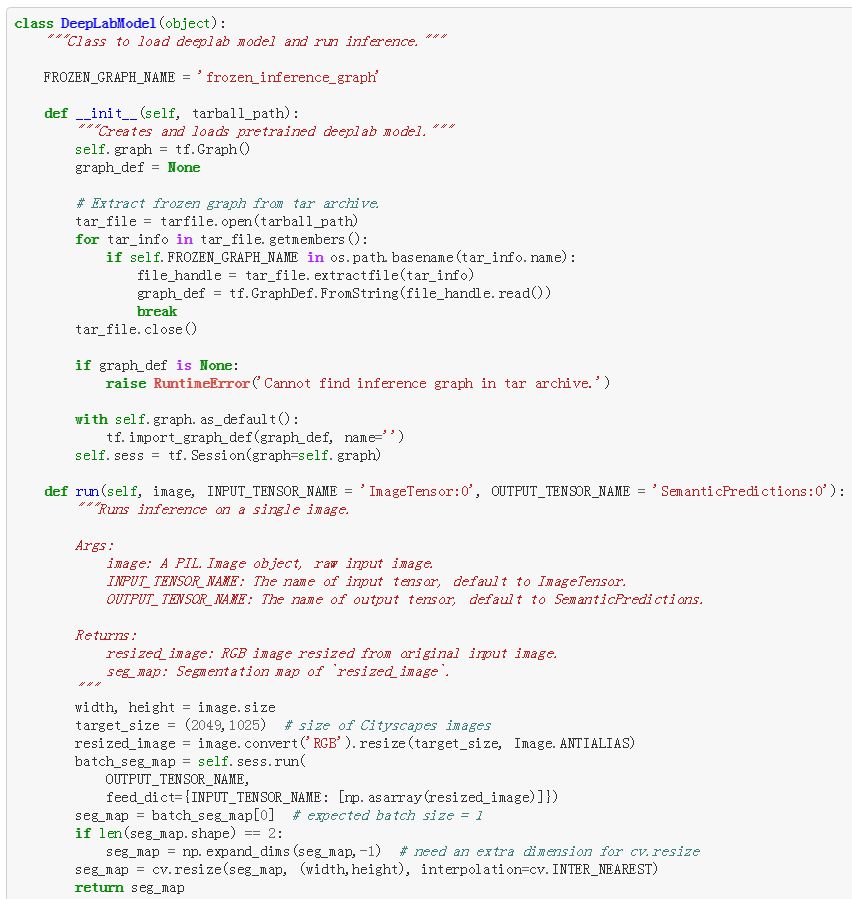
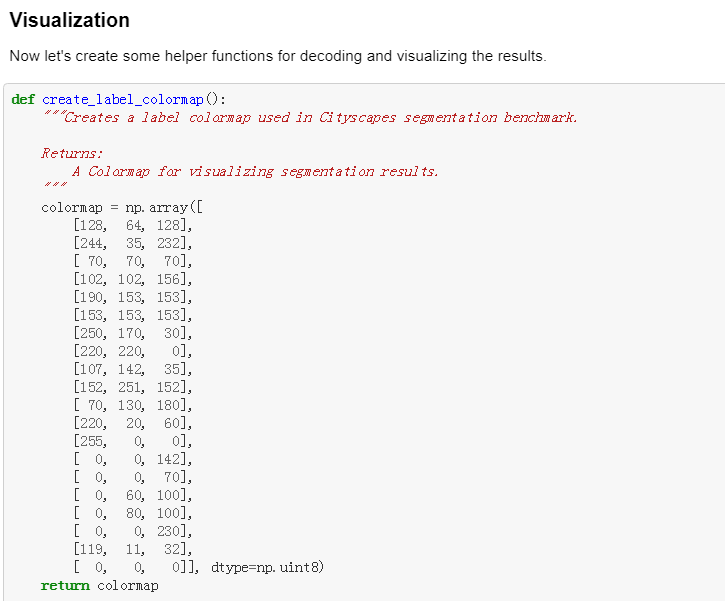
附部分示例教程
MIT Driving Scene Segmentation

参考链接:
https://github.com/lexfridman/mit-deep-learning
https://deeplearning.mit.edu/
查看完整内容:
请关注专知公众号(扫一扫最下面专知二维码,或者点击上方蓝色专知)
后台回复“MITDL” 就可以获取最新代码下载链接~
专知《深度学习:算法到实战》今晚8点开讲,聚焦深度学习基础与前沿技术及实战,欢迎报名!
专知开课啦!《深度学习: 算法到实战》, 中科院博士为你讲授!
-END-
专 · 知
专知开课啦!《深度学习: 算法到实战》, 中科院博士为你讲授!
请加专知小助手微信(扫一扫如下二维码添加),咨询《深度学习:算法到实战》参团限时优惠报名~

欢迎微信扫一扫加入专知人工智能知识星球群,获取专业知识教程视频资料和与专家交流咨询!

请PC登录www.zhuanzhi.ai或者点击阅读原文,注册登录专知,获取更多AI知识资料!

点击“阅读原文”,了解报名专知《深度学习:算法到实战》课程
展开全文



