成为VIP会员查看完整内容
VIP会员码认证
首页
主题
发现
会员
服务
注册
·
登录
计算机视觉
关注
0
计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理,使电脑处理成为更适合人眼观察或传送给仪器检测的图像。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取‘信息’的人工智能系统。
综合
百科
荟萃
VIP
热门
动态
论文
精华
JointViT: Modeling Oxygen Saturation Levels with Joint Supervision on Long-Tailed OCTA
Arxiv
0+阅读 · 4月18日
TaCOS: Task-Specific Camera Optimization with Simulation
Arxiv
0+阅读 · 4月18日
DeblurGS: Gaussian Splatting for Camera Motion Blur
Arxiv
0+阅读 · 4月18日
Octopus v3: Technical Report for On-device Sub-billion Multimodal AI Agent
Arxiv
0+阅读 · 4月18日
WebXR, A-Frame and Networked-Aframe as a Basis for an Open Metaverse: A Conceptual Architecture
Arxiv
0+阅读 · 4月18日
Single-temporal Supervised Remote Change Detection for Domain Generalization
Arxiv
0+阅读 · 4月18日
Dynamic Typography: Bringing Text to Life via Video Diffusion Prior
Arxiv
0+阅读 · 4月18日
SLAIM: Robust Dense Neural SLAM for Online Tracking and Mapping
Arxiv
0+阅读 · 4月17日
Weight Copy and Low-Rank Adaptation for Few-Shot Distillation of Vision Transformers
Arxiv
0+阅读 · 4月17日
IntrinsicAnything: Learning Diffusion Priors for Inverse Rendering Under Unknown Illumination
Arxiv
0+阅读 · 4月17日
PE-MVCNet: Multi-view and Cross-modal Fusion Network for Pulmonary Embolism Prediction
Arxiv
0+阅读 · 4月17日
ShapeFormer: Shape Prior Visible-to-Amodal Transformer-based Amodal Instance Segmentation
Arxiv
0+阅读 · 4月17日
Achieving Rotation Invariance in Convolution Operations: Shifting from Data-Driven to Mechanism-Assured
Arxiv
0+阅读 · 4月17日
Influencer Backdoor Attack on Semantic Segmentation
Arxiv
0+阅读 · 4月17日
Deepfake detection by exploiting surface anomalies: the SurFake approach
Arxiv
0+阅读 · 4月17日
参考链接
父主题
人工智能
计算机科学
子主题
视觉问答
目标跟踪
光学字符识别
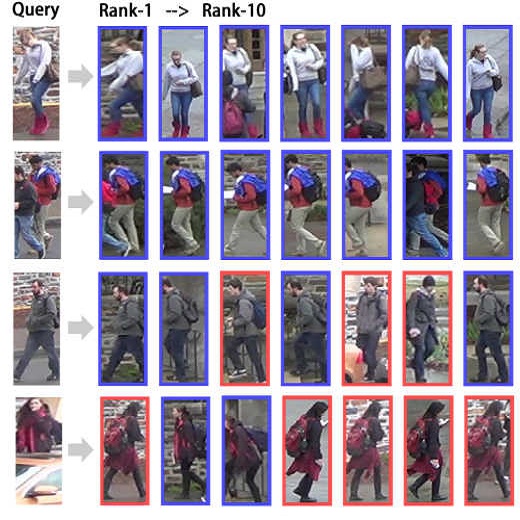
行人重识别
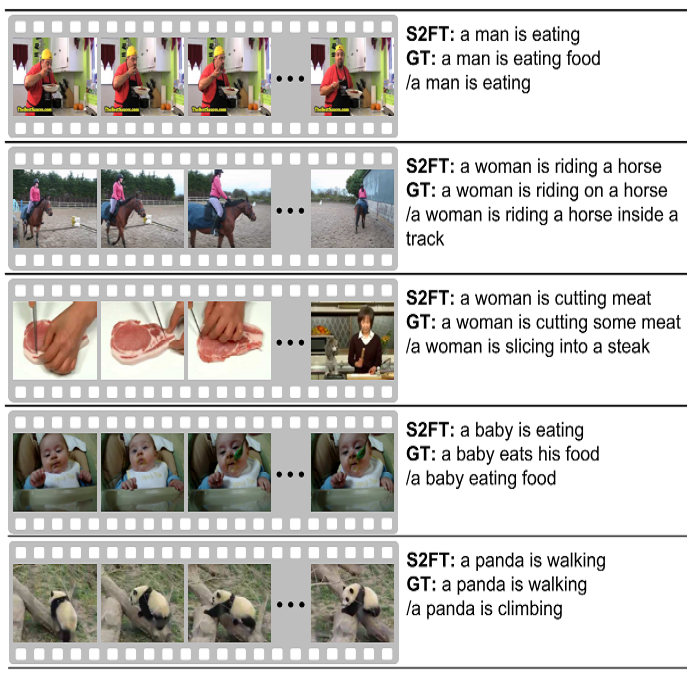
视频描述生成(Video Caption)
图像检索
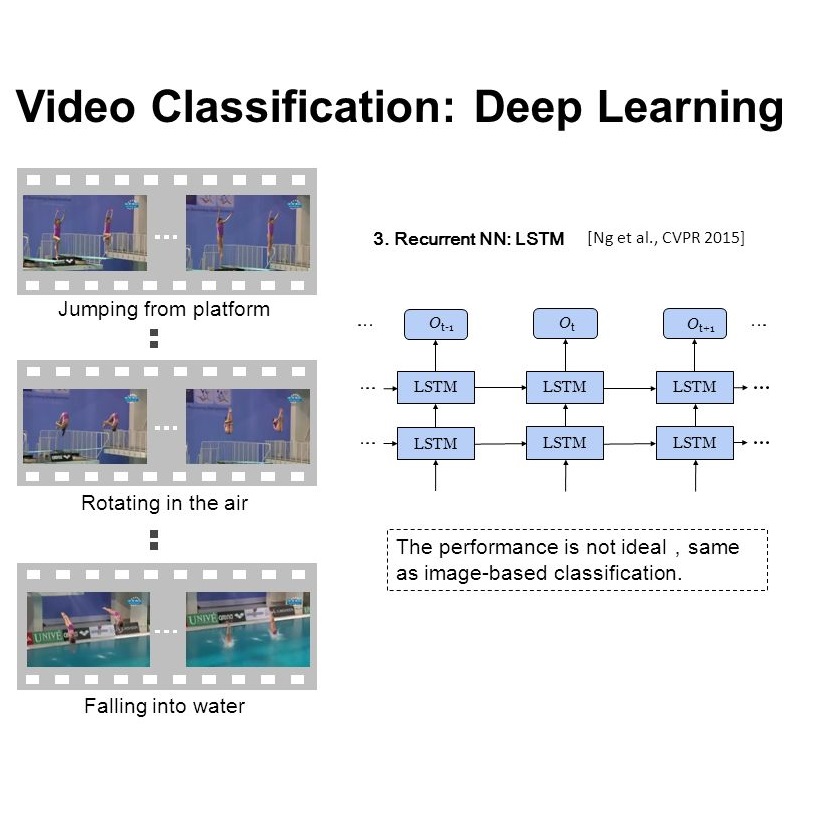
视频分类
增强现实(AR)
图像超分辨率重建
图像分割
图像处理
图像修复
图像缩放
朱俊彦
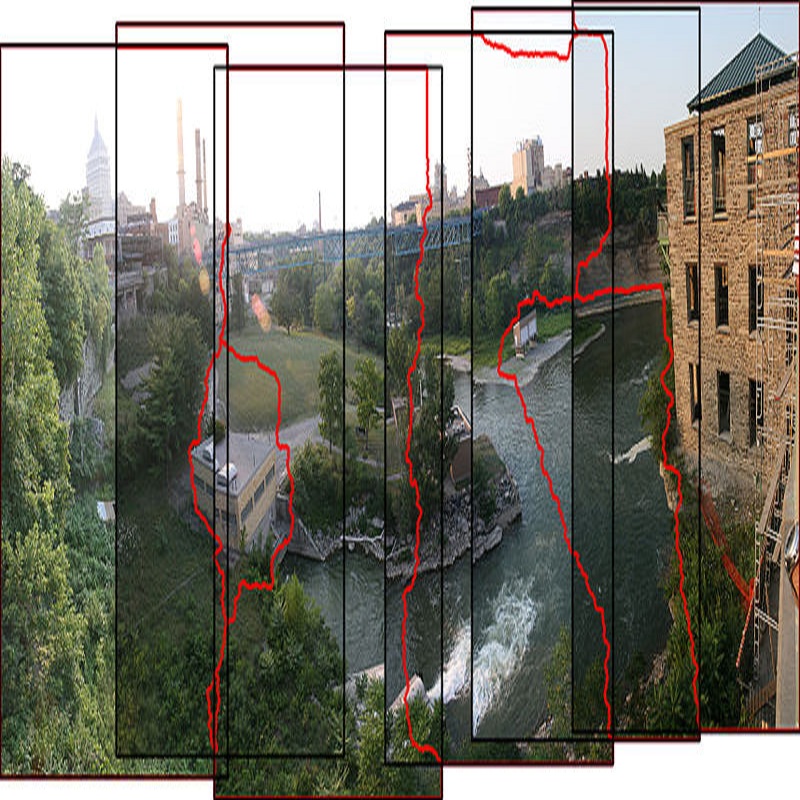
图像拼接
虚拟现实(VR)
三维重建
运动行为分析
图像配准
目标检测
图像识别
图片分类
特征提取
图像描述生成(Image Caption)
提示
微信扫码
咨询专知VIP会员与技术项目合作
(加微信请备注: "专知")
微信扫码咨询专知VIP会员
Top