如何评价深蓝学院的三维点云课程?

深蓝学院开设的《三维点云处理》课程,详细讲解经典的点云算法,比如Octree、GMM、Spectral Clusting、Point Net++、ICP、NDT等,并且配有实践项目,让大家在真实的数据集上实现、应用这些算法。
同时,还会涉猎前沿的感知方向的深度学习算法,了解实际应用中各种算法的优势与局限,以及如何修改算法应对长尾/边缘问题。
讲师介绍


黎嘉信
高仙机器人深度学习总监、新加坡研发中心总监。2014年清华大学本科毕业,2018年新加坡国立大学博士毕业,师从陈本美教授和Lee Gim Hee教授。此前历任Motional感知科学家和夜间驾驶负责人、字节跳动AI Lab视觉科学家。以第一作者发表多篇计算机视觉/机器人顶级会议论文,包括CVPR、ICCV、ICRA、IROS等。
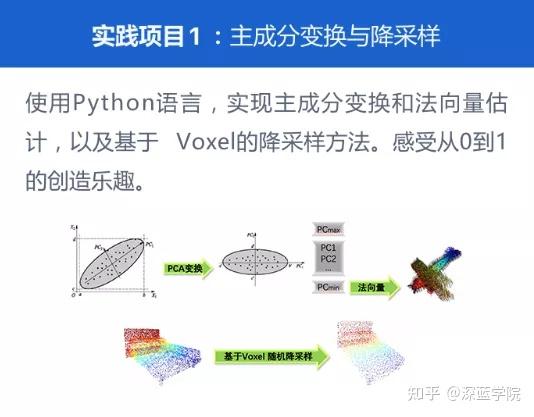
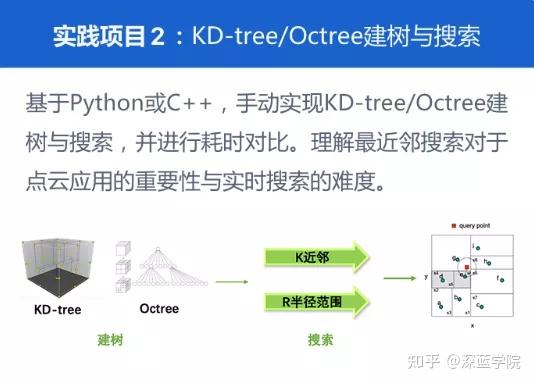
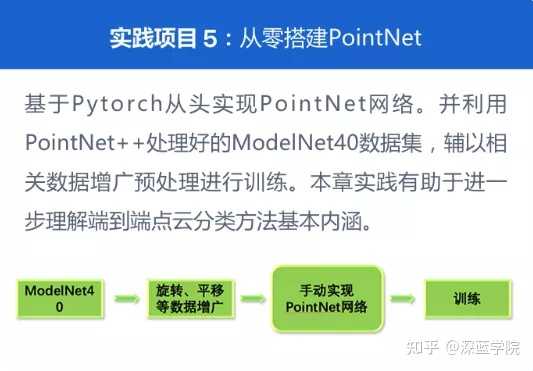
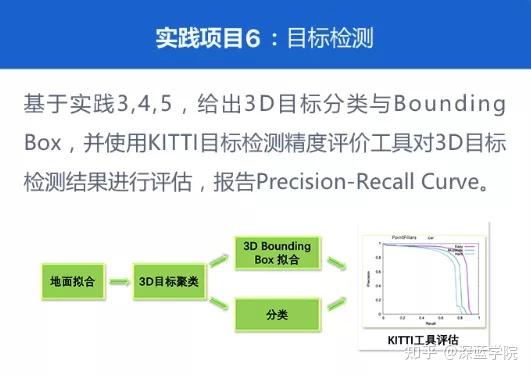
实践项目













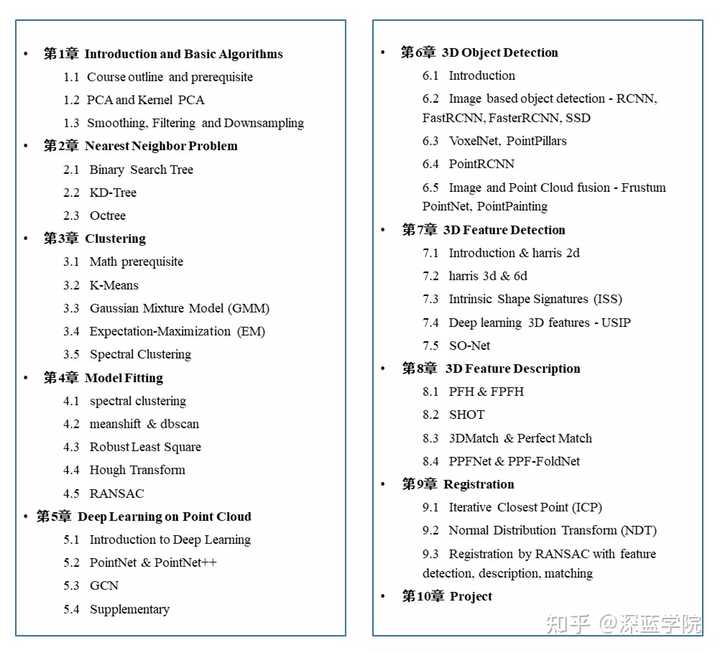
课程大纲

学后收获
1. 对三维点云这一领域有全方位的认知,了解三维感知的各种问题及解决方案;
2. 深入理解各个经典点云算法,比如octree,ICP,PointNet等,并且在真实数据集上实现、应用这些算法;
3. 涉猎最前沿的感知(Perception)方向的深度学习算法,比如物体检测、点云配准、特征提取等,了解学术界的热点问题及发展趋势;
4. 了解实际应用中各种算法的优势及局限,对于具体问题如何选择合适的算法,以及如何修改算法应对长尾/边缘问题(longtail/edge cases)。
看完上面的介绍相信同学们对于深蓝学院的三维点云课程有了一定的了解,很多同学在学习完三维点云课程后还需要具备其他多传感器相关的内容。深蓝学院在今年隆重推出『多传感器融合感知』课程,帮助大家系统梳理常用的相机、激光雷达的时间空间标定方法,细致讲解当下主流的融合感知策略(前融合与后融合),并通过融合感知的Project,让大家具备亲自动手实现一个完整的融合感知系统的能力。
主讲老师

傅东旭/自动驾驶高级算法专家
历任百度自动驾驶高级研发工程师,纽劢科技L4部门研发负责人,商汤自动驾驶研发副总监。浙江大学控制系硕士,毕业至今拥有6年+的L4自动驾驶研发经验,擅长3D感知、定位建图和多传感器标定等技术。
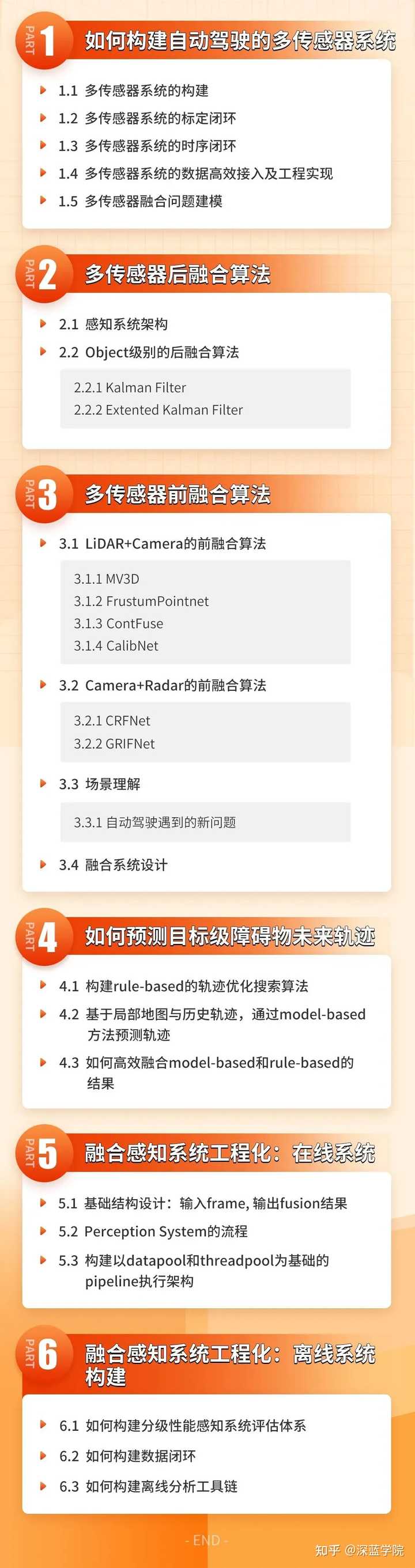
课程大纲

课程亮点
1. 从传感器特点出发,详细介绍L2/L4自动驾驶系统的设计思路;
2.涵盖多传感器感知中的前融合与后融合等主流算法;3.实现融合感知算法的工程框架,完成一个融合感知的系统。
你将收获
1.熟悉自动驾驶系统中多传感器的用途以及传感器系统的构建思路;
2.掌握多传感器系统时域和空域的同步方法;
3. 学会如何将多种传感器的结果融合成稳定的感知输出;
4. 培养工程系统实现的能力。
咨询更多
课程正在火热报名中!
扫码添加深蓝学院-黎新
备注【知乎多传感器】,才会通过好友哦!
