
三篇目标检测最新论文 |PP-YOLO:一个有效且高效的对象检测器实现

PP-YOLO:一个有效且高效的对象检测器实现

[Submitted on 23 Jul 2020 (v1), last revised 27 Jul 2020 (this version, v2)]
摘要:
目标检测是计算机视觉研究的重要领域之一,在各种实际场景中起着至关重要的作用。在实际应用中,由于硬件的限制,往往需要牺牲准确性来保证检测器的推断速度。因此,必须考虑目标检测器的有效性和效率之间的平衡。本文的目标不是提出一种新的检测模型,而是实现一种效果和效率相对均衡的对象检测器,可以直接应用于实际应用场景中。考虑到YOLOv3在实际应用中的广泛应用,我们开发了一种新的基于YOLOv3的对象检测器。我们主要尝试结合现有的几乎不增加模型参数和FLOPs的各种技巧,在保证速度几乎不变的情况下,尽可能提高检测器的精度。由于本文的所有实验都是基于桨叶进行的,所以我们称之为PPYOLO。通过多种技巧的结合,PP-YOLO可以在效率(45.2% mAP)和效率(72.9 FPS)之间取得更好的平衡,超过了目前最先进的检测器efficient entdet和YOLOv4.
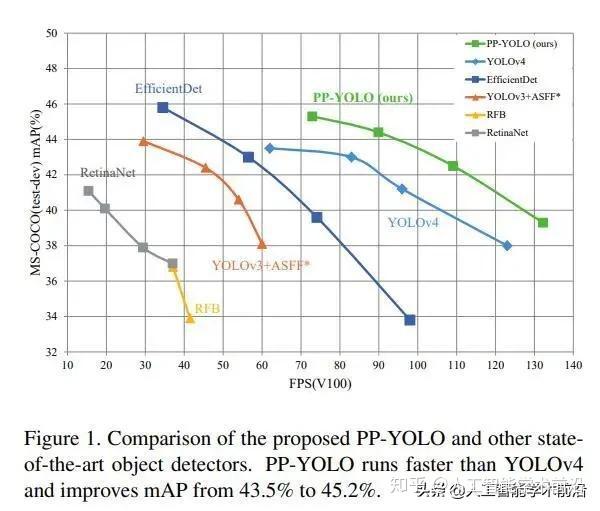

图1所示。提出的PP-YOLO和其他先进的对象检测器的比较。PP-YOLO运行速度比YOLOv4快,并将mAP从43.5%提高到45.2%。

关注人工智能学术前沿 回复 :cv07
5秒免费获取论文pdf文档,及项目源码
Transformers端到端目标检测

[Submitted on 6 Jul 2020]
摘要:
提出了一种将目标检测看作直接集预测问题的新方法。我们的方法简化了检测流程,有效地消除了许多手工设计的组件的需求,比如一个非最大抑制程序或锚的生成,显式地编码了我们关于任务的先验知识。新框架的主要成分,被称为检测变压器或DETR,是一个基于集的全球损失,迫使唯一的预测通过二部匹配,和变压器编码器-解码器架构。给定一小组固定的学习对象查询,DETR根据对象和全局图像上下文的关系,直接并行输出最终的预测集。与许多其他现代探测器不同,新模型在概念上很简单,不需要专门的库。DETR在具有挑战性的COCO对象检测数据集上展示了与完善的、高度优化的更快的RCNN基线相当的准确性和运行时性能。此外,DETR可以很容易地推广,以统一的方式产生全光分割。我们展示了它显著优于竞争基线。
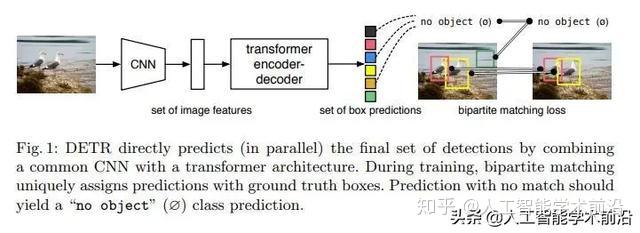

图1:DETR通过将普通CNN与变压器结构相结合,直接(并行)预测最终的检测集。在训练期间,二部图匹配用地面真相盒唯一地分配预测。没有匹配的预测应该是“无对象”(∅)类预测。
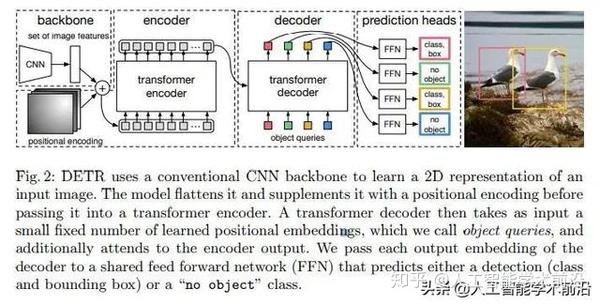

图2:DETR使用传统的CNN主干来学习输入图像的2D表示。在将其传递到transformer编码器之前,模型会将其扁平化并使用位置编码对其进行补充。然后,变压器译码器将少量固定数量的已学习的位置嵌入(我们称之为对象查询)作为输入,并另外处理编码器的输出。我们将解码器的每个嵌入输出传递到一个共享前馈网络(FFN),该网络可以预测检测(类和边界盒)或无对象类。
关注人工智能学术前沿 回复 :cv08
5秒免费获取论文pdf文档,及项目源码
BorderDet:用于稠密对象检测的边界特征

[Submitted on 27 Jul 2020]
摘要:
密集物体探测器依赖滑动窗口模式,通过规则的图像网格预测物体。同时,利用网格点上的特征图生成边界盒预测。点特征使用方便,但可能缺少明确的边界信息,无法进行精确定位。在本文中,我们提出了一种简单而有效的算子-边界对齐,从边界的极值点提取“边界特征”来增强点特征。在边界对齐的基础上,我们设计了一种新的边界检测体系结构,该结构明确地利用边界信息来实现更强的分类和更精确的定位。利用ResNet-50主干,我们的方法将单级检测器FCOS提高2.8 AP增益(38.6 v. 41.4)。使用ResNeXt-101-DCN骨干,我们的BorderDet获得50.3 AP,优于现有的最先进的方法。
我们的贡献有以下三方面:
1 .分析了密集目标检测器的特征表示,论证了用边界特征补充单点特征表示的意义。
2 .我们提出了一种新的特征提取算子BorderAlign来利用边界特征增强特征。基于BorderAlign,我们提出了一种高效、准确的对象检测器体系结构BorderDet。
3.我们在没有铃铛和哨子的COCO dataset上取得了最先进的结果。我们的方法在单阶段FCOS和两阶段FPN上都取得了显著的改进,分别提高了2.8 AP和3.6 AP。我们基于ResNext-101-DCN的BorderDet产生50.3 AP,优于现有的最先进的方法。
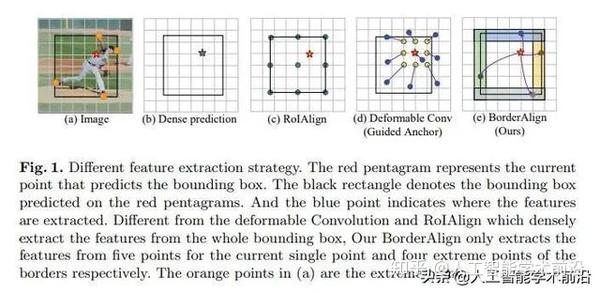

图1所示。不同的特征提取策略。红色的五角星表示预测边界框的当前点。黑色矩形表示红色五角形上预测的边界盒。蓝点表示提取特征的位置。与可变形卷积和RoIAlign对整个边界框密集提取特征的方法不同,我们的BorderAlign分别对当前边界的单点和四个极值点只提取5个点的特征。(a)中橙色的点是极值点
关注人工智能学术前沿 回复 :cv09
5秒免费获取论文pdf文档,及项目源码