CS131 Lecture06:边缘检测

CS131 Lecture06:边缘检测
by:斯坦福大学计算机科学系
github:
(包含中英文版课件及相关课程视频)
1 介绍
本课程包括边缘检测、Hough转换和RANSAC。边缘检测提供了有意义的语义信息,有助于理解图像。这有助于分析元素的形状、提取图像特征,以及了解所描绘场景的属性变化,例如深度不连续、材质类型和光照等。我们将探讨Sobel和Canny边缘检测技术的应用。下一节将介绍用于检测图像中参数模型的Hough变换;例如,通过Hough变换可以检测由两个参数定义的线性线。此外,这种技术可以推广到检测其他形状(如圆)。然而,正如我们将看到的,使用霍夫变换在拟合具有大量参数的模型时并不有效。为了解决这个模型拟合问题,在最后一节中引入了随机抽样一致性(RANSAC);这种非确定性方法重复抽样数据子集,根据如何将剩余的数据点分类为“内点”或“异常值”,并使用它们来拟合模型,。它们可以通过拟合模型来解释(即它们与模型的接近程度)。结果用于最终选择用于实现最终模型拟合的数据点。最后一节对RANSAC变换和Hough变换进行了比较。
2 边缘检测
边缘检测的目的
边缘检测与哺乳动物的眼睛非常相关。大脑中的某些神经元擅长识别直线。来自这些神经元的信息被整合到大脑中,用于识别物体。事实上,边缘对于人类的识别非常有用,线条图几乎和原始图像一样容易识别(图1)。我们希望能够提取信息、识别对象以及恢复图像的几何和视点。
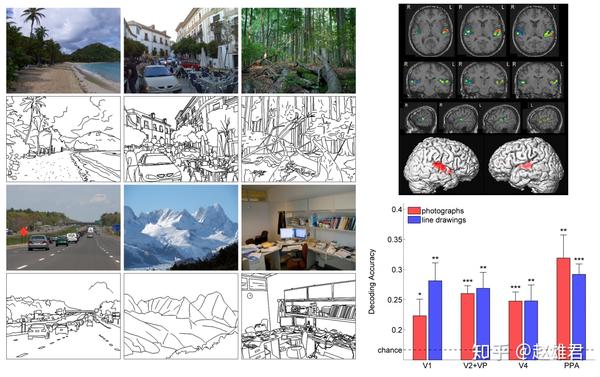

图1:大脑的某些区域对边缘作出反应;线条图和原始图像一样容易识别
边缘基础知识
图像中有四种可能的边缘来源:表面法向不连续(表面急剧改变的方向)、深度不连续(一个表面在另一个表面后面)、表面颜色不连续(单个表面改变颜色)、光照(光强)不连续(阴影/照明)。这些不连续性如图2a所示;不同类型的边缘如图2b所示:
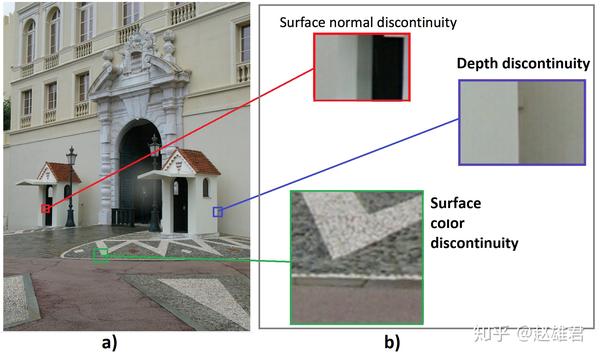

图2。由于表面颜色、表面深度和表面法向的不连续性导致不同类型的边缘
当梯度的幅度较大时,图像中会出现边缘。
3 求解梯度
为了求梯度,我们必须首先求x和y方向的导数。
离散导数
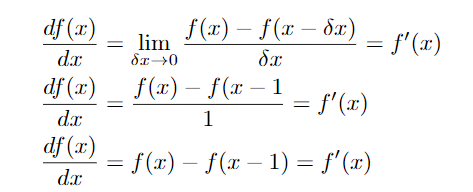

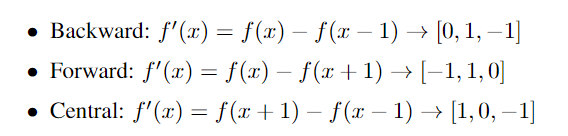
有三种不同的求导方式(后向,前向,中心)(上一节也提到了):
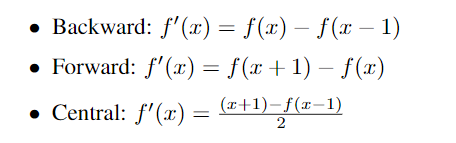

每一个都可以表示为一个过滤器(将过滤器与图像卷积得到导数)

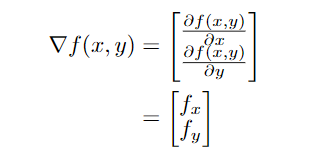
梯度计算如下:
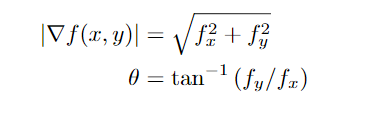
也可以计算梯度的大小和角度:
减少噪音
噪声会干扰梯度,导致使用简单的方法无法找到边缘,即使边缘仍然可以被眼睛检测到。解决方法是先平滑图像。设f为图像,g为平滑核。因此,为了找到平滑的梯度,我们必须计算(1维示例):
根据导数卷积定理:
这种简化为我们节省了一次操作。平滑虽然消除了噪音,但使边缘变模糊。不同粒径的平滑可以检测不同尺度的边缘。
索贝尔(Sobel)噪声检测
该算法利用了2 个3*3的核,与图像卷积,近似于原始图像的x和y导数。


这些矩阵表示平滑和微分的结果。
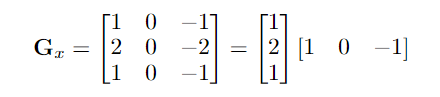

Sobel滤波器存在许多问题,包括定位精度不好。Sobel过滤器也倾向于水平和垂直边缘,而不是倾斜边缘。
Canny边缘检测器
Canny边缘检测器有五个算法步骤:
- 抑制噪声
- 计算梯度大小和方向
- 应用非极大值抑制
- 滞后阈值
- 检测边缘的连通性分析
抑制噪声
我们既可以抑制噪声,也可以使用类似于Sobel滤波器的方法计算x和y方向的导数。
计算梯度大小和方向
应用非极大值抑制
这部分算法的目的是确保边缘是特定的(唯一的)。因此,我们假设边缘发生在梯度达到极大值时。我们抑制任何具有非极大渐变的像素。基本上,如果像素不是三个像素中最大的一个,并且与渐变方向相反,则设置为0。此外,所有梯度都四舍五入到最接近的45°
滞后阈值
所有剩余的像素都受到滞后阈值的影响。本部分使用两个值作为高阈值和低阈值。每个值高于高阈值的像素都被标记为强边。低于低阈值的每个像素都设置为0。两个阈值之间的每个像素都标记为弱边。
检测边缘的联通性分析
最后一步是连接边缘。所有标记为强边的像素都是边。对于弱边缘像素,只有和强边缘像素毗邻的弱边缘像素是边。这部分使用BFS或DFS来查找所有边缘。
4 Hough(霍夫)变换
霍夫变换介绍
Hough变换是一种检测图像中特定结构的方法,即直线。然而,霍夫变换可以用来检测任何已知参数方程的结构。它在噪声和部分遮挡下提供了一个强大的探测器。
霍夫变换检测线的目标
Hough变换可以用来检测图像中的线条。要做到这一点,我们需要定位组成图像中直线的像素集。这项工作的目的是在应用边缘检测器后检测图像中的线条,以获得仅边缘的像素(因此,我们发现哪些像素集构成了直线)。
在A、B空间使用Hough变换检测直线
对于一个像素点(xi,yi),有无限的线可以穿过这一点。我们可以定义一条穿过这个像素(xi,yi)的线:
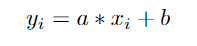
这样,我们可以将每个像素转换为A,B空间,方法是将此公式重新编写为:
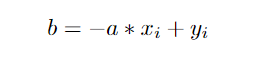
这个等式表示A,B空间中的一条线,并且每个(A,B)点代表通过我们的点xi,yi的一条可能的线。
因此,对于每个像素xi,yi,在我们的边缘像素集合中,我们将其转换成A,B空间以获得一条直线。


图3:从原始空间到霍夫空间的转换
A和B空间中的线的交点表示这些线对通过这些点的线Yi=AX+B进行折衷。例如:假设我们有两点x1,y1=(1,1)和x2,y2=(2,3)。我们将这些点转换成A,B空间,其中B=-A*1+1和B=-A*2+3。求解这两条线的交点,得到A=2和B=-1。(A,B)空间中的交叉点为通过x,y空间中两个点的线提供的值。
(简而言之,这里想表达的是:hough变换相当于一种映射变换,只不过是从一种表达方式换为另外一种。其根本思想是将原有的y=kx+b中的x,y看做固定值,而k,b看成变量来运算的。x-y坐标和k-b坐标有点----线的对偶性。这里的对偶性指的是x-y系坐标中的点对应k-b坐标系中的线,x-y坐标系中的线对应k-b坐标系中的点。)
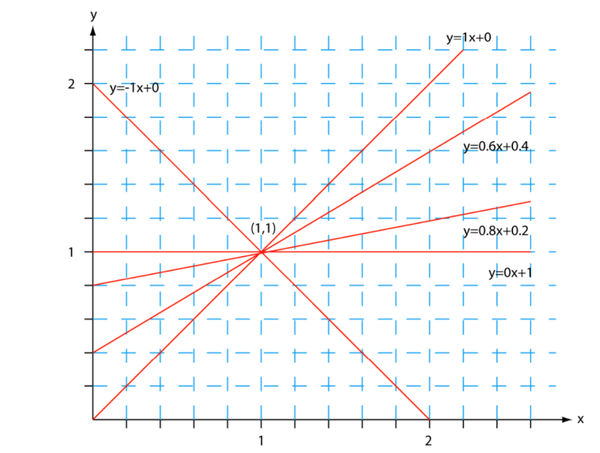

图4.穿过原始空间点的线条
https://blog.csdn.net/mysteryrat/article/details/12495425 (关于霍夫变换好的解释)
“蓄电池单元”
为了得到“最佳”的线条,我们将A,B空间量化为单元。对于我们的a,b空间中的每一行,我们向它通过的每个单元格添加一个“投票”或一个计数。我们对每一行都这样做,所以在最后,“投票”最多的单元格具有最多的交叉点,因此应该与图像中的实线相对应。A,B空间中的hough变换算法如下:
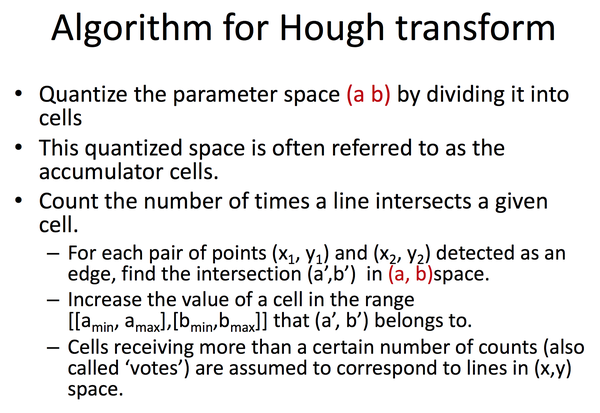

图5:Hough变换算法

极坐标系下的霍夫变换
参考:霍夫变换——神奇的特征提取算法:
总结
Hough变换的优点是概念简单(只需变换和在Hough空间中找到交叉点)。它也相当容易实现,并且可以很好地处理丢失和阻塞的数据。另一个优点是,只要结构具有参数方程,它就可以找到除直线以外的其他结构。
缺点包括在参数越多,计算上越复杂。它也只能同时查找一种结构(因此不能将线和圆放在一起)。也不能检测到线段的长度和位置。它可以被“明显”的线条欺骗,并且不能同线性的线段作区分。
5 RANSAC(随机抽样一致)
随着模型复杂度的增加(如参数数量),hough变换失去了其有效性;本节详细介绍了随机样本一致性(ransac)技术[1]的设计,该技术提供了一种在图像中拟合模型的计算有效方法。首先介绍了RANSAC的基本思想,然后介绍了其算法。
RANSAC基础
RANSAC算法用于估计图像中模型的参数(即模型拟合)。RANSAC的基本思想是使用随机选择的最小数据子集多次解决拟合问题,并选择性能最佳的拟合。为了实现这一点,RANSAC尝试迭代地识别与我们试图拟合的模型相对应的数据点。
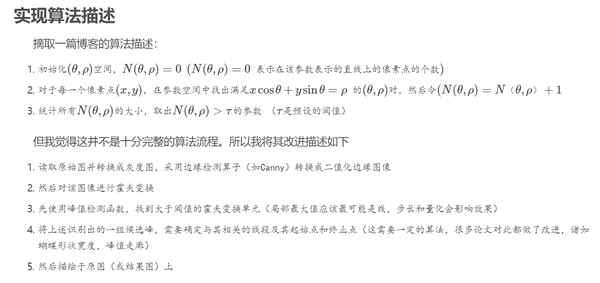
图7a说明了将线性模型(即2个参数)拟合到数据上的示例;当大多数数据点拟合线性模型时,右上角的两个点会显著影响整体拟合的精度(如果它们包含在拟合中)。RANSAC算法旨在通过识别数据中的“内点”和“异常点”来解决这一挑战。
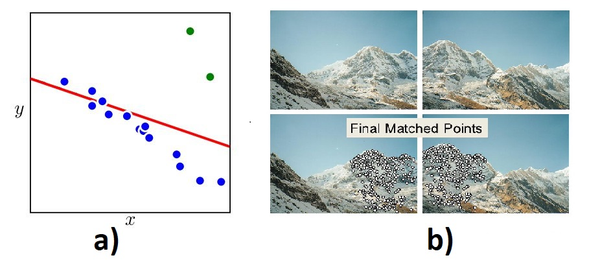

图7:a)RANSAC检测异常值以改进参数估计;b)RANSAC图像拼接应用
应用
RANSAC算法可用于估计不同模型的参数;这在图像拼接(图7b)、离群值检测、车道检测(线性模型估计)和立体摄像机计算中被证明是有益的。
算法
RANSAC算法对原始数据的名义子集进行迭代采样(例如,2个点用于直线估计);将模型拟合到每个样本,并计算与此拟合对应的“内点”数;这包括接近拟合模型的数据点。接近阈值的点(例如,2个标准偏差或预先确定的像素数)被视为“内点”。如果大部分数据视为该拟合的“内点”,则认为拟合模型是好的。在拟合良好的情况下,使用所有的内点重新拟合模型,并丢弃异常值。重复此过程,并比较具有足够大的内点分数(例如,大于预先指定的阈值)的模型估计,以选择性能最佳的拟合。图8说明了线性模型及其三个样本的这一过程。第三个样本(图8c)提供了最佳拟合,因为它包含了最多数量的内点。
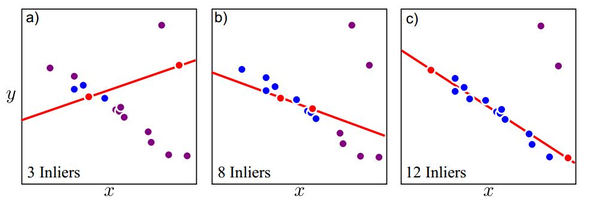

图8:线性模型估计和三个随机样本的RANSAC算法证明
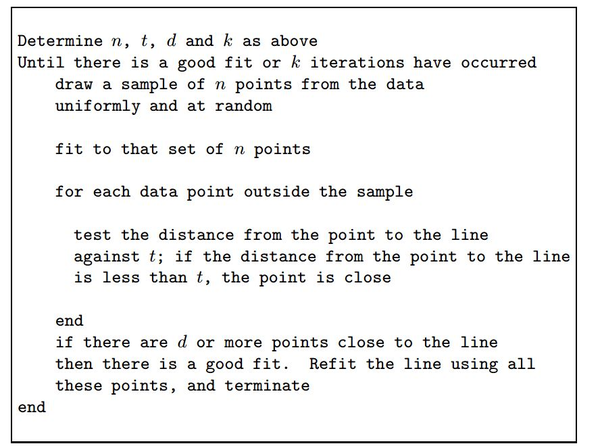

图9:RANSAC伪代码
RANSAC如图9所示。RANSAC回路中包括的主要步骤:
- 1:从数据中随机选择种子组。
- 2:使用所选种子组执行参数估计。
- 3:确定内点(接近估计模型的点)。
- 4:(如果存在足够多的内点,)使用所有内点重新估计模型。
- 5:重复步骤1-4,最后将估计值保持在最大的内点和最佳的匹配状态。
需要多少样品?
RANSAC是一种非确定性的模型拟合方法;这意味着样本数量必须足够大,以提供对参数的高置信估计。所需样本的数量取决于1)拟合参数的数量和2)噪声的数量。图10列出了基于p=0.99和样本大小变化(即参数数量)和异常值分数(即噪声)所需的最小样本数量。估计更大的模型和噪声数据需要更多的样本。需要选择足够多的样本(k),以确保只看到坏样本(pf)的概率较低:

其中w和n分别是模型拟合所需的内点分数和点数。最小样本数:
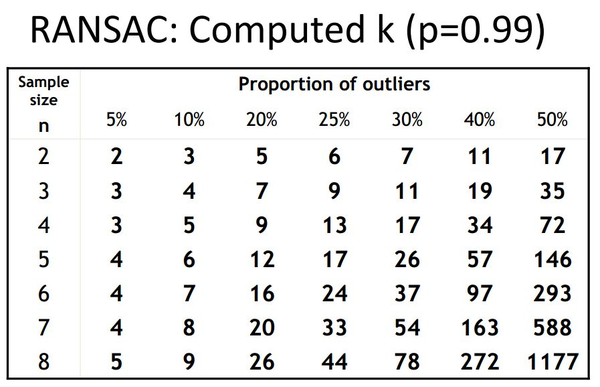

图10:噪声总体和模型尺寸的不同选择的样本数
优势、局限性和考虑因素
RANSAC的优点在于其实现简单,在模型拟合领域的应用范围广。其他优点包括计算效率;采样方法为所有可能的特征组合提供了更好的解决问题的替代方法。
在某些情况下,使用hough变换而不是ransac会更有效:
- 1:参数数目较少,例如,使用Hough变换可以有效地实现线性模型估计(2个参数),而图像拼接则需要更节省的计算方法,如RANSAC。
- 2:如果噪声总体很高,正如我们前面看到的,噪声的增加需要更广泛的采样方法(更高的采样数),从而增加了计算成本。增加的噪声降低了参数估计的正确率和内分类的准确性。
高噪声数据中的低性能是RANSAC的主要限制;这一点尤其重要,因为现实问题的异常值率很高。
(可参考:RANSAC )