
图卷积神经网络系列:6. | 谱域回顾 & 空域图卷积模型GNN

一 . 谱域图卷积回顾
虽然我知道上一节中已经回顾了一遍了,但是我就是还有再回顾一遍。

Point 1 :在谱域卷积中,我们的基本思路是,先将空域输入信号和空域空域卷积核转换到谱域,然后在谱域中相乘,再通过傅里叶反变换转换回空域:
f_1(t) ★ f_2(t) = \mathcal{F}^{-1}[F_1(w) \cdot F_2(w)] \\
其中, \mathcal{F} 为傅里叶变换。
Point 2 :图结构中信号的空域和谱域的转换是由图傅里叶变换实现的:其中,拉普拉斯特征向量作为经典傅里叶变换中的基函数,拉普拉斯矩阵的特征值作为经典傅里叶变量中的“频率”。
Point 3 :介绍了三个经典的谱域图卷积模型。
★ SCNN:用可学习的对角矩阵来代替谱域的卷积核:
x ★ _Gg_\theta = UFU^\top x \\
★ChebNet:用切比雪夫多项式代替谱域的卷积核:
x ★_Gg_\theta =Ug_\theta U^\top x = \sum_{k=0}^K \beta_kT_k(\hat L)x \\
★ GCN:进一步对ChebNet进行简化,仅考虑一阶切比雪夫不等式,且每个卷积核只有一个参数。
x ★_Gg_\theta = \theta(\tilde{D}^{-1/2}\tilde{W}\tilde{D}^{-1/2})x \\
二 . 谱域图卷积的缺陷
1 . 谱域图卷积不适用于有向图。
- 首先,由于谱域图卷积是严格基于卷积定理和图傅里叶变换的,而图傅里叶变换的应用是有限制的,仅能够在无向图中应用。
- 其次,谱域图卷积的第一步是将空域信号转换到谱域,当图傅里叶变换无法使用时,谱域图卷积也就无法再进行计算了。
- 最后,在大量应用场景中,是有向图场景,也就是 W_{ij} \ne W_{ji} 。因此谱域图卷积此时无法使用。
2 . 谱域图卷积假定图结构是固定的。
x ★ _Gg = \mathcal{F}^{-1}(\mathcal{F}(x) \odot \mathcal{F}(g)) = U(U^\top x \odot U^\top g ) \\
也就是说,上式中的U必须是预先已知的且固定不变的。
在训练期间,图结构不能变化,也就是说不能改变节点之间的权重,不能增删节点。如果是图像识别领域则没有什么问题,但是某些领域,图结构可能会变化,如推荐系统,社交网络,交通数据等。例如在推荐系统中,新的用户和新的物品的加入,或是用户偏好发生短期改变,势必会造成节点的增删和权重的变化。
3 . 谱域图卷积模型的复杂度问题。
- SCNN需要进行拉普拉斯矩阵的谱分解,计算耗时,复杂度高, 为 O(n^3) 。
- 虽然ChebNet和GCN对SCNN进行了改进,不需要对拉普拉斯矩阵进行谱分解了,但是由于其可学习的参数过于简化(GCN中每一个卷积核只有一个可学习的参数),降低模型复杂度的同时,也一定程度上限制了模型性能。
基于谱域图卷积存在的问题,那么,能否绕过图谱理论,重新定义图上的卷积呢?
既然你诚心诚意的发问了,那我就大发慈悲的告诉你:是可以的!

现有的图卷积方法大致可以分为两类:谱域图卷积方法和空域图卷积方法:
- 谱域图卷积:根据图谱理论和卷积定理,将数据由空域转换到谱域做处理。理论基础扎实。
- 空域图卷积:不依靠图谱卷积理论,直接在空间上定义卷积操作。灵活性很强。
三 . 空域图卷积模型: GNN
PAPER:Hechtlinger Y, Chakravarti P, Qin J, et al. A Generalization of Convolutional Neural Networks to Graph-Structured Data.[J]. arXiv: Machine Learning, 2017
经典的卷积操作是如何定义的呢?
即固定数量邻域节点排序后,与相同数量的卷积核参数相乘求和。
传统卷积有着固定的邻域大小(如3x3卷积核为八邻域),同时有着固定的顺序,也就是从左上角到右下角。
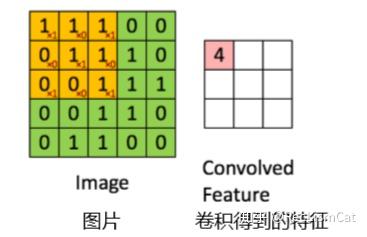
因此,卷积的操作可以拆分为如下两步:
Step1:构建邻域。
- 找到固定数量的邻居节点。
- 对找到的邻居节点进行排序。
Step2:对邻域的点与卷积核参数做内积。
要想将经典卷积操作应用到图结构上,有如下两个问题:
- 对于图结构数据来说,不存在固定的邻域结构,每一个节点的邻域大小是不同的且变化的。
- 同一邻域内的节点不存在顺序性。
因此,GNN中所提出的解决思路为:
- 1 . 使用随机游走的方法,根据被选中的概率期望大小选择固定数量的邻居节点。
- 2 . 然后根据节点被选择的概率期望来对邻域进行排序。
符号定义
P 为图上的随机游走转移矩阵,其中, P_{ij} 表示节点 i 到节点 j 的转移概率。
S 为相似度矩阵。该矩阵的定义和作用与邻接矩阵类似。
D 为度矩阵, D_{ii} = \sum_{j}S_{ij} 。
具体的步骤如下:
第一步:GNN假设存在图结构是已知的,那么 相似度矩阵S 和度矩阵 D 也就是已知的。随机游走概率转移矩阵 P 定义如下: P= D^{-1}S \\
第二步:使用归一化的邻接矩阵来作为转移矩阵。
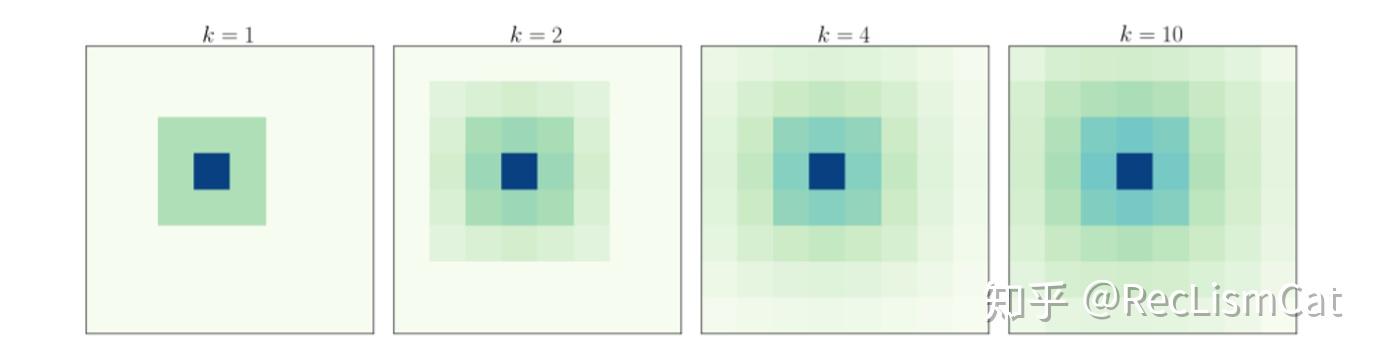
第三步:定义多步的转移期望:
Q^{(0)} = I \\ Q^{(1)} = I +P\\ ...\\ Q^{(k)} = \sum_{i=0}^{k} P^k
其中, Q_{ij} ^{(k)} 表示为 k 步内,由节点 i 出发到节点 j 的期望访问数。

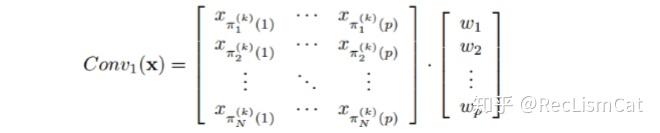
第四步:根据期望大小来选择邻域:
\pi_i^{(k)}(c) 表示节点的序号。该节点为(k步内)由节点 i 出发的访问期望数第 c 大的节点。那么有: Q_{i \pi_i^{(k)}{(1)}}>Q_{i \pi_i^{(k)}{(2)}}>...>Q_{i \pi_i^{(k)}{(N)}} 。
第五步:做1D卷积:

在非欧空间中,数据有两个特点:序列无序性和维数可变性。而在欧式空间中的规则数据的特点为:序列有序性和维数一致性。
如果能够从非欧空间的图结构数据中找到固定数量的邻居节点,然后对找到的邻居节点进行排序,那么得到的数据就和欧式空间中的有序和规则数据类似了。
本质上,GNN的做法是强制将一个图结构数据变化为了一个类似规则的数据,从而可以被1D卷积所处理。
