go map学习探秘
整体结构
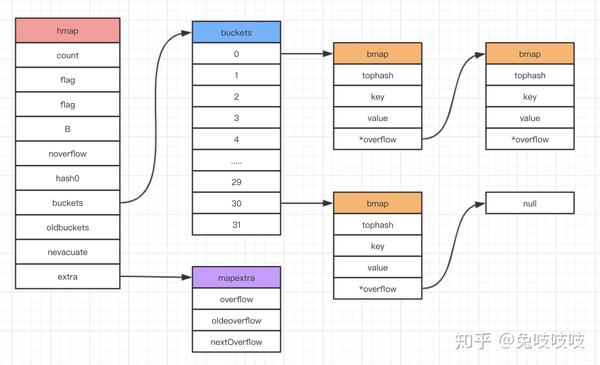
go的map实现,是一个hash map,对于hash冲突使用的是拉链法解决。比较不同的是,bucket下使用的是bmap这个结构,一个bmap会保存8个key。如果超过了8个,会重新申请一个bmap空间,通过指针overflow关联。
在超过负载的情况下,会进行扩容,扩容分成两种,一种是等量扩容,一种是扩展到原有的二倍。
extra用作gc遍历的时候优化和map内部的overflow的复用。
hmap
我们常规make map就是返回这个hmap结构的指针。所以我们把map作为函数的入参时,会之际直接对原有的map进行修改。
type hmap struct {
count int //map key的总数
flags uint8 //map状态的标记,写状态等
B uint8 //bucket数量为2^b
noverflow uint16 //溢出的map的数量,B小于15是精准值,其他情况是近似值
hash0 uint32 //hash随机值,算hash的是用到
buckets unsafe.Pointer //buckets指针
oldbuckets unsafe.Pointer //只有在扩容的时候才会用到
nevacuate uintptr //扩容位置计数
extra *mapextra //map的扩展信息
}
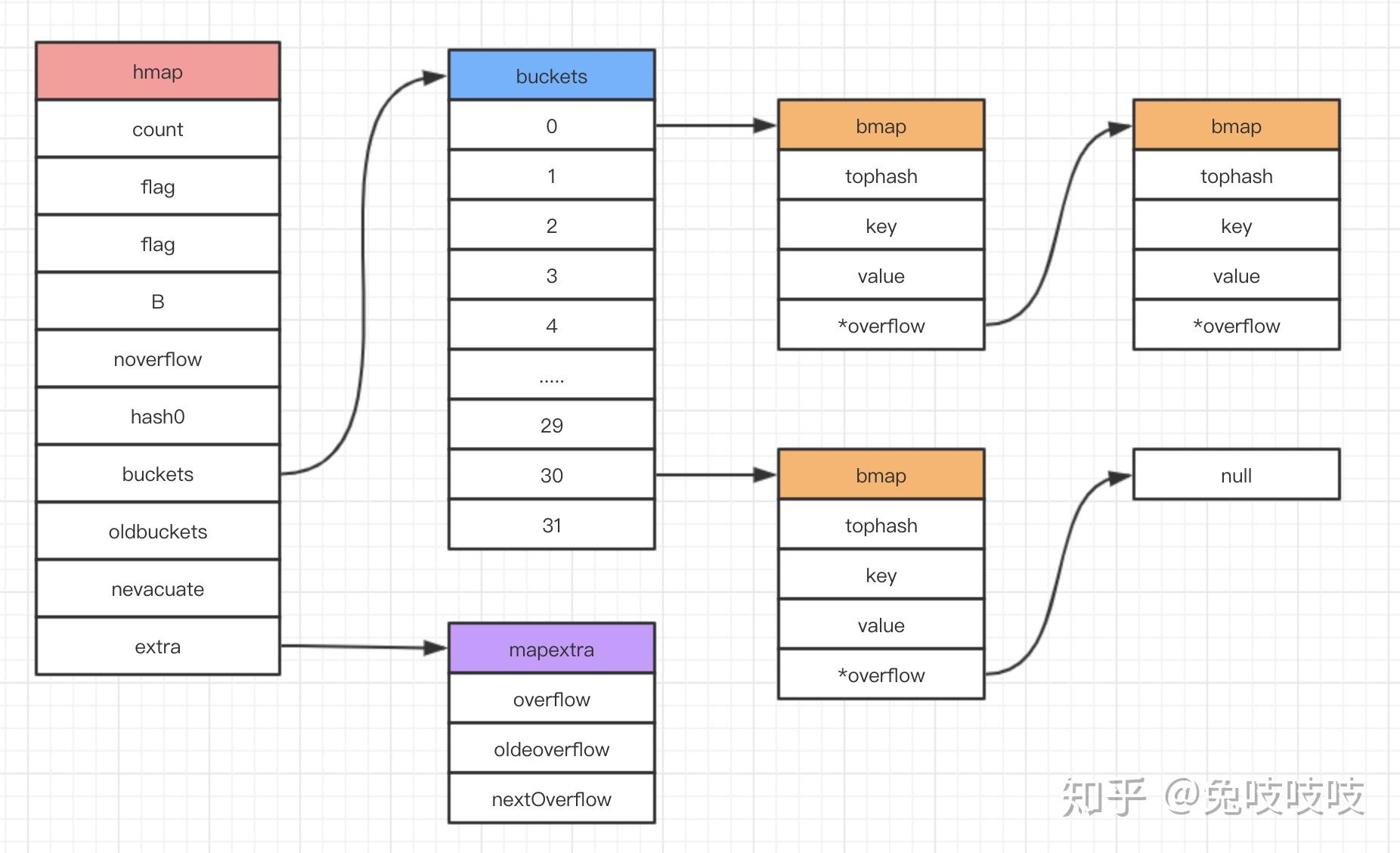
bmap
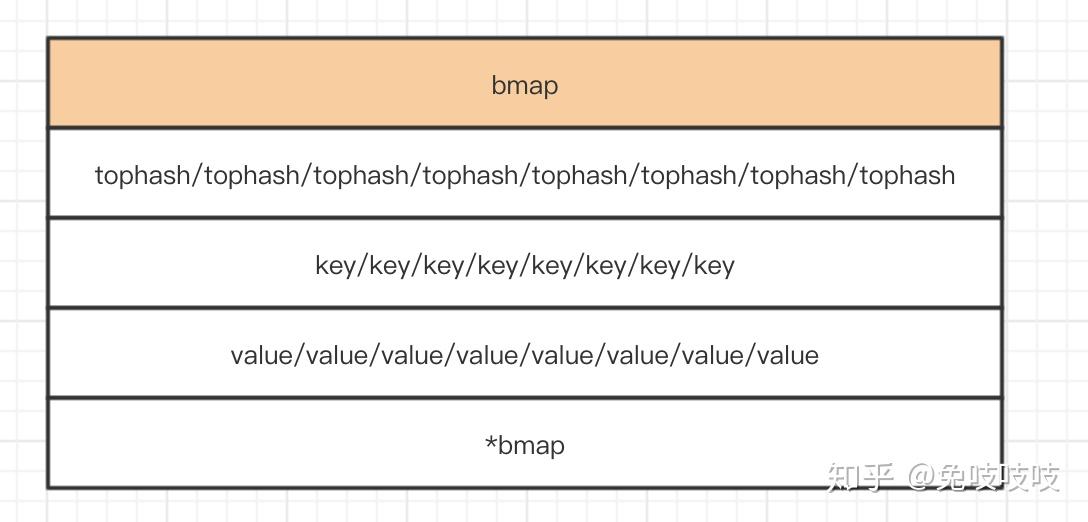
一个bmap保存8个元素,内存中排列的方式是按照tophash,key,value,overflow的顺序方式。8个key集中存放一起,8个value集中存放一起,这么做的目的是在 map[int64]int8的情况下减少内存使用。
tophash除了有快速比较的功能以外,还有用于标记该bmap的状态
// A bucket for a Go map.
type bmap struct {
// tophash generally contains the top byte of the hash value
// for each key in this bucket. If tophash[0] < minTopHash,
// tophash[0] is a bucket evacuation state instead.
tophash [bucketCnt]uint8
// Followed by bucketCnt keys and then bucketCnt values.
// NOTE: packing all the keys together and then all the values together makes the
// code a bit more complicated than alternating key/value/key/value/... but it allows
// us to eliminate padding which would be needed for, e.g., map[int64]int8.
// Followed by an overflow pointer.
}
mapextra
如果map的key,value都不包含指针,我们为了减少gc的时候扫描全部的map,我们会对该map做个特殊的标记。但是我们上面提到bmap.overflow本身是个指针,所以我们把所有overflow的bmap统一存储到mapextra结构中,用于gc扫描。所以只有在key,value都不包含指针的情况下,这个overflow才会有用。
nextOverflow是为了overflow的复用
// mapextra holds fields that are not present on all maps.
type mapextra struct {
overflow *[]*bmap
oldoverflow *[]*bmap
nextOverflow *bmap
}如何定位一个Key
- 定位bucket
- 遍历bucket下的所有元素
- 定位对应的key
1.定位bucket
计算对应的hash,这里我们引入一个hash的随机种子
hash := alg.hash(key, uintptr(h.hash0))
找到对应的bucket
bucket的长度一定为2^B,在这种情况下,我们可以把取模运算转化为位运算,降低计算的耗时
m := bucketMask(h.B) //获取bucket的掩码
//掩码为(1<<B)-1
func bucketMask(b uint8) uintptr {
return bucketShift(b) - 1
}
//通过hash&m得到第几个bucket,乘上bucketsize得到对应的地址
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize)))
2.遍历bucket下的所有元素
这里遍历该bucket下的所有bmap,通过overflow找到对应的溢出桶
每个for 8次,遍历所有的元素
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
}
}
也是通过地址来获取overflow
func (b *bmap) overflow(t *maptype) *bmap {
return *(**bmap)(add(unsafe.Pointer(b), uintptr(t.bucketsize)-sys.PtrSize))
}
3.定位对应的key
先通过tophash快速适错,tophash相同才会,继续比较key
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
//先比较tophash是否正确
if b.tophash[i] != top {
continue
}
//通过计算出来地址,来获取对应的key
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey {
k = *((*unsafe.Pointer)(k))
}
//如果key相同,则取出对应的value,返回
if alg.equal(key, k) {
v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
if t.indirectvalue {
v = *((*unsafe.Pointer)(v))
}
return v
}
}
}
扩容
扩容的条件:
1.负载因子过大
如果当前count数量 > bucket的数量*6.5,则需要进行2倍的扩容
func overLoadFactor(count int, B uint8) bool {
return count > bucketCnt && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
}
2.溢出桶过多
noverflow表示当前map溢出桶的个数,如果B很大,这里是个近似值
func tooManyOverflowBuckets(noverflow uint16, B uint8) bool {
if B > 15 {
B = 15
}
return noverflow >= uint16(1)<<(B&15)
}
扩容开始
hashGrow做了一些扩容初始工作
func hashGrow(t *maptype, h *hmap) {
bigger := uint8(1)
//如果不是负载过的,则是等size增长
if !overLoadFactor(h.count+1, h.B) {
bigger = 0
h.flags |= sameSizeGrow
}
oldbuckets := h.buckets
newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil)
flags := h.flags &^ (iterator | oldIterator)
if h.flags&iterator != 0 {
flags |= oldIterator
}
// commit the grow (atomic wrt gc)
h.B += bigger
h.flags = flags
//buckets保存到oldbuckets中
//在h.bucket创建新的buckets
h.oldbuckets = oldbuckets
h.buckets = newbuckets
h.nevacuate = 0
h.noverflow = 0
//extra相关的转移操作
if h.extra != nil && h.extra.overflow != nil {
// Promote current overflow buckets to the old generation.
if h.extra.oldoverflow != nil {
throw("oldoverflow is not nil")
}
h.extra.oldoverflow = h.extra.overflow
h.extra.overflow = nil
}
if nextOverflow != nil {
if h.extra == nil {
h.extra = new(mapextra)
}
h.extra.nextOverflow = nextOverflow
}
}
迁移
每次在查询的时候,会对该个bucket先进行迁移,每次会迁移2个bucket
func growWork(t *maptype, h *hmap, bucket uintptr) {
//迁移当前bucket
evacuate(t, h, bucket&h.oldbucketmask())
//如果还需要扩容,nevacuate是一个扩容桶的计数,会扩容nevacuate bucket,
if h.growing() {
evacuate(t, h, h.nevacuate)
}
}