
Talk | 北大前沿计算研究中心助理教授王鹤: 类别级物体六维位姿估计及追踪
公众号:将门创投 (thejiangmen)
本文为TechBeat人工智能社区第307期线上Talk。
这次我“门”邀请到的是斯坦福大学博士、北大前沿计算研究中心助理教授——王鹤来到TechBeat人工智能社区分享!他与大家分享的主题是: “类别级物体六维位姿估计及追踪”,介绍了有关六维位姿、关节类物体、位姿追踪的相关研究与近期的一些进展和思考。点击【这里】,立即免费收看Talk~
Talk·信息
主题:类别级物体六维位姿估计及追踪
嘉宾:斯坦福大学博士、北大前沿计算研究中心助理教授 王鹤
Talk·提纲
物体的六维位姿估计是一个经典的计算机视觉问题,被广泛应用于机器人视觉、抓取和控制,以及增强现实等领域。传统的六维位姿估计仅适用于少数已知的训练集中的物体,无法应用于未见过的新物体,因而是一种实例级位姿估计。本次Talk将会将这一问题推广到类别级六维物体位姿,可用于估计已有类别中的大量新颖物体的六维位姿和三维尺寸,对实现可泛化的机器人视觉系统有重要推动作用。
本次分享的主要内容如下:
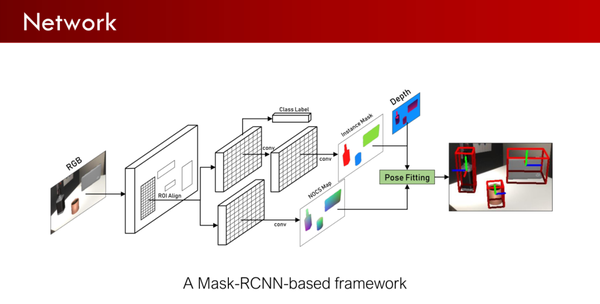
1. 刚体的类别级六维位姿估计 (CVPR'19 Oral)
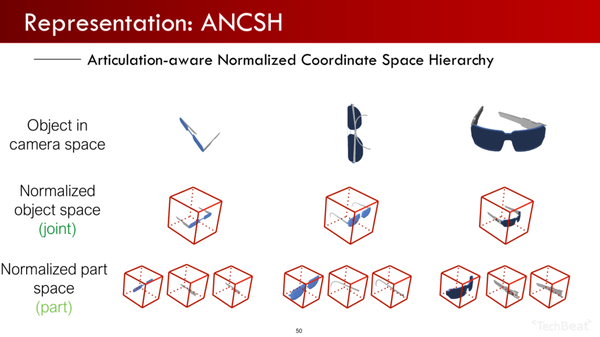
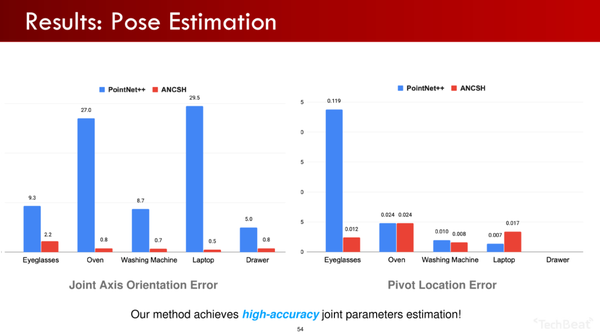
2. 关节类物体的类别级位姿估计(CVPR'20 Oral)
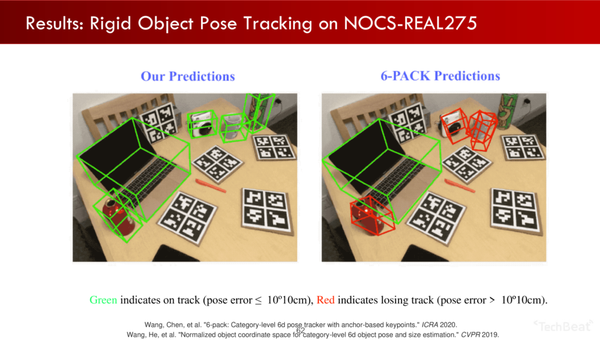
3. 类别级位姿追踪
Talk·参考资料
这是本次分享中将会提及的资料,建议提前预习哦!
[1] Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation (CVPR’19 Oral)
https://arxiv.org/abs/1901.02970
[2] Category-Level Articulated Object Pose Estimation (CVPR’20 oral)
https://arxiv.org/abs/1912.11913
[3] CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
https://arxiv.org/abs/2104.03437
Talk·精彩片段




Talk·嘉宾介绍

王鹤,北京大学前沿计算研究中心助理教授,博士生导师,兼北京通用人工智能研究院(BIGAI)研究员。研究方向为三维视觉、机器人学。博士毕业于斯坦福大学电子工程系,导师为美国两院院士Leondias J. Guibas。王鹤博士期间的工作开辟了类别级物体六维位姿估计(category-level object pose estimation)的新方向,已被CVPR 2021列入投稿子领域,并获得了2019年Eurographics Best Paper提名奖。他将担任2022年国际计算机视觉与模式识别会议(CVPR)领域主席。
▶ 点击【这里】,一起听Talk啦~
更多精彩Talk,尽在【持续上新 | Talk合辑】专栏
@将门创投· 让创新获得认可
如果喜欢,别忘了赞同、关注、分享三连哦!笔芯❤
