CVPR 2018 | Repulsion loss:专注于遮挡情况下的行人检测
极市平台是专业的视觉算法开发和分发平台,加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击文末“阅读原文”立刻申请入群~

论文地址:https://arxiv.org/abs/1711.07752
背景介绍
与通用目标检测相比,遮挡情况在行人检测中更为普遍,为此也是行人检测领域最广为关注的问题之一。现实场景中行人的遮挡情况主要分为两种情况:一种是其他物体对行人的遮挡,这往往会带来目标信息的缺失,进而导致漏检;另一种是行人个体之间的相互遮挡,这往往会引入大量的干扰信息,进而导致更多的虚检。本文重点解决的是后一种情况导致的遮挡问题。作者将对这一问题进行了深入思考,并从loss的层面提出了一种新颖的解决方案,为我们呈现了一场思路和实验都十分精彩的盛宴。
主要内容
行人检测的遮挡问题
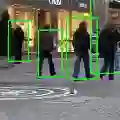
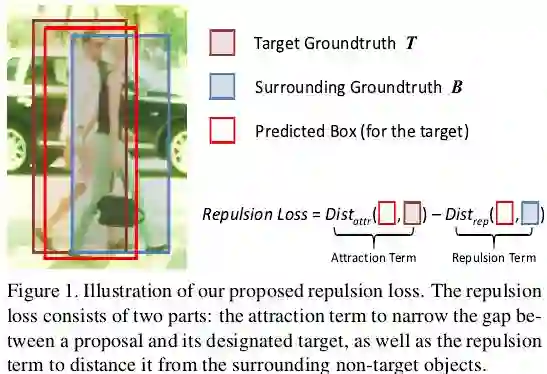
本文重点解决的问题是:在行人个体之间的相互遮挡时,如何提高行人检测的准确率。无论是在自动驾驶还是智能监控场景下,行人以群体形式出现的情况时有发生,如图1所示:两个行人个体之间存在着相互遮挡,而这种遮挡对检测算法的影响体现在两个层面:一是目标框定位不准确,如图中红色框;二是算法对NMS的阈值的选取更为敏感了,如果NMS阈值选取过小,则周围的目标框就被过滤掉了(图中蓝色框),但蓝色框对于图中女士而言却是正确的预测,如果NMS阈值选取过大,则又会带来更多的虚检。对于这样一个两难问题,作者的解决思路在图中的式中也得到了直观体现:该思路的核心就是一种全新的loss,叫做Repulsion loss,其包括两个部分:前者是使得预测框更接近目标框,后者是使得预测框要尽可能远离周围的目标框。
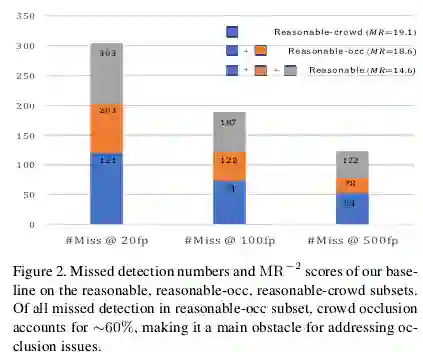
作者首先研究了现有公开数据集CityPersons[1]中遮挡出现的情况以及这种情况对检测器性能的影响。在CityPersons验证集中,共有3157个行人标注框,其中48.8%的行人相互遮挡的IOU高于0.1,26.4%的行人相互遮挡的IOU高于0.3,可见这种遮挡情况的出现是极其普遍的。那么遮挡到底会给检测器带来什么样的影响?作者训练了Faster R-CNN检测器作为baseline对这个问题进行了回答,如图2所示:评估指标选用行人检测中常用的Miss Rate (MR,越低越好),其中Reasonable-occ代表所有遮挡情况,Reasonable-crowd代表所有遮挡情况中自遮挡的部分,图中列出了在平均20,100,500个虚检情况下的missed detection,从图中可以发现遮挡占据了近60%的席位(蓝色+橙色),而在这60%席位中,自遮挡又占据了近60%。综上,图2足以说明:遮挡是影响行人检测性能的一个非常重要的因素,而行人之间的自遮挡更是重中之重。
解决之道:
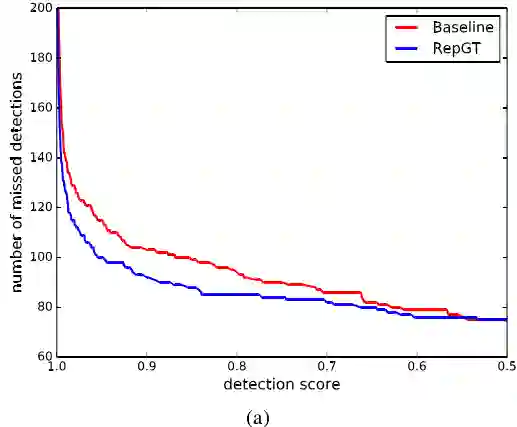
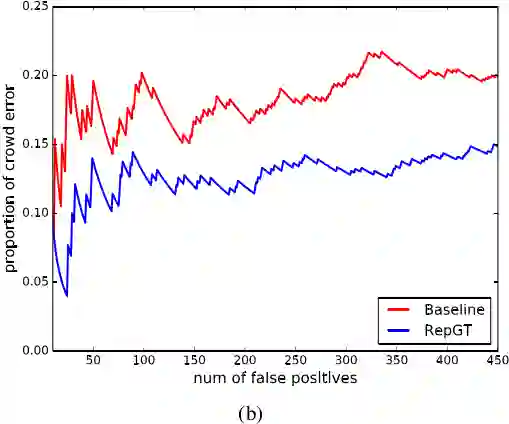
针对以上分析,作者决定从loss层面来解决行人之间的自遮挡问题,首先我们直观感受下本文方法RepGT的有效性,如下图所示:图(a)展示了RepGT对漏检的有效性,可以发现在detection score较高时,RepGT的漏检更少,图(b)展示了RepGT对自遮挡情况下的虚检的有效性,可以发现RepGT的虚检中自遮挡所导致的虚检比例更低。
上图实验所展示的效果验证了本文的一大贡献:Repulsion loss,其包括三个子模块:

其中第一个子模块LAttr是使得预测框和匹配上的目标框尽可能接近;第二个子模块LRepGT是使得预测框和周围的目标框尽可能远离,第三个子模块LRepBox是使得预测框和周围的其他预测框尽可能远离。
Attraction Term
LAttr采用通用检测框架中的回归loss,可以采用欧式距离、SmoothL1距离以及IoU距离,为了使得和其他算法具有可比性,本文这里采用的是SmoothL1距离:

Repulsion Term (RepGT)
因为LRepGT是使得预测框P和周围的目标框G尽可能远离,这里的周围的目标框是除了匹配上的目标框以外的IoU最大的目标框,也即
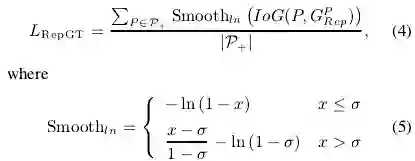
从式(4)中可以发现当预测框P和周围的目标框G的IoG越大,则产生的loss也会越大,因此可以有效防止预测框偏移到周围的目标框上。此外,式(5)中的sigma是一个调整LRepGT敏感程度的超参数,文中图5给出了验证性实验,这里不再赘述,详情可见论文。
值得注意的是这里的度量距离为什么选用IoG而不是IoU呢?仔细思考一下,如果是IoU的话,那么只要预测框足够大就一定能够使得RepGT loss减小,而这和我们的预期目标是不一致的,这点作者在文中也有论述。
Repulsion Term (RepBox)
因为LRepBox是使得预测框Pi和周围的其他预测框Pj尽可能远离,Pi和Pj分别匹配上不同的目标框,它们之间的距离采用的是IoU,则RepBox loss定义为:

从式(4)中可以发现当预测框Pi和周围的其他预测框Pj的IoU越大,则产生的loss也会越大,因此可以有效防止两个预测框因为靠的太近而被NMS过滤掉,进而减少漏检。
实验分析
实验细节:
本文的detector采用的是改进版的Faster R-CNN,以保证对比的公平性,验证实验是在CityPersons验证集上做的。对比实验是在Caltech测试集上做的,训练和测试均采用新标注。
实验结果:
首先我们看下在CityPersons验证集上的剥离实验(如下,表3):
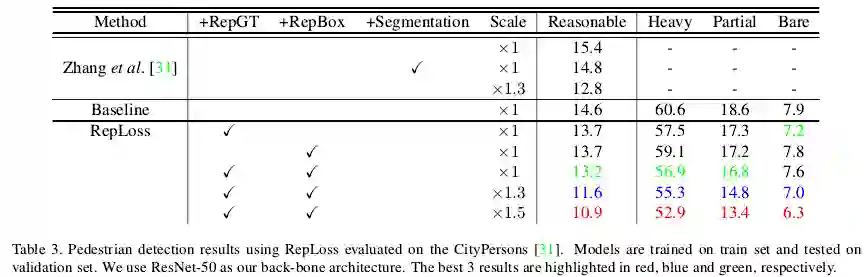
可以发现加上RepGT loss和RepBox loss,都可以给baseline带来较为明显的性能提升,尤其是在遮挡情况较为严重的情况下(Heave occlusion)的效果最为显著。本文的两种loss共同将baseline在Reasonable设定下的Miss Rate从14.6减少到了13.2。最后将图像扩大1.5倍得到了最佳的10.9的表现。
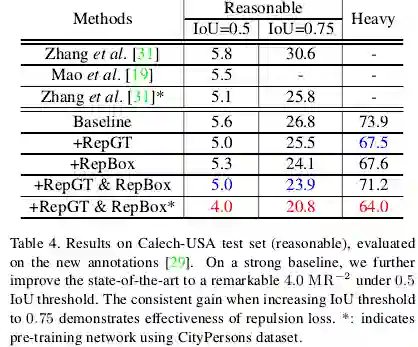
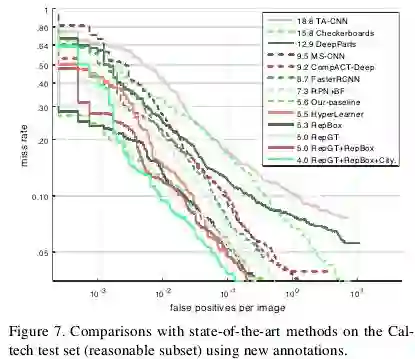
同样在Caltech测试集上的表现也是state-of-the-art(如下,表4和图7):在Caltech上再一次证明了本文方法对Heave occlusion的有效性。在Reasonable设定下取得了4.0的表现,据笔者所知,在目前已公开发表的实验结果中是最好的了。
总结展望
本文贡献:
(1)深入研究了行人检测中的遮挡问题(包括物体遮挡和行人之间的遮挡),并分析了影响检测器性能的关键因素。
(2)基于对以上问题的分析,从loss层面为行人检测中的自遮挡问题提出了一种全新的解决方案,在CityPersons和Caltech两个行人检测数据集上展现了非常出色的性能。
个人见解:
(1)本文探讨了行人检测中长期以来广为关注的问题——遮挡,是极具启发性的一篇工作。已有工作中主要采用的是‘分part’,‘加语义信息’等思路加以解决,然而‘分part’毕竟需要人工设定,难以穷尽现实场景中纷繁复杂的遮挡情况,本文另辟蹊径从loss的角度,使得网络自动学习的过程中不断提升定位性能,减少了人为干预,从新的角度发挥了深度学习end-to-end的优势。
(2)值得注意的还有表3,尽管repulsion loss将检测器在Reasonable设定下的Miss Rate从14.6减少到了13.2(下降了1.4个点),但仅仅将图像扩大1.5倍,Miss Rate又从13.2下降到了10.9(下降了2.3个点),我们知道图像扩大是为了检测到更多的小目标,足以说明弱小目标的存在对检测器的性能影响同样是不容忽视的。那么,针对弱小目标的检测,能否从loss层面找到一个合理的解决方案呢?期待你的精彩发现。
参考文献:
[1] Citypersons: A diverse dataset for pedestrian detection. CVPR (2016)
[2] Unitbox: An advanced object detection network. ACM MM (2016)
本文为极市原创文章,转载请联系小编微信(H445202522061),同时欢迎大家投稿~
END
—本文为极市原创,欢迎大家投稿,转载请后台留言—
*推荐文章*
PS-GAN:如何合成高质量行人图像提升行人检测性能?
CVPR2018:基于时空模型无监督迁移学习的行人重识别
每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击左下角“阅读原文”立刻申请入群~