酱发现 | 要让快递更快点?你可能得去找这家韩国公司
↑ ↑ ↑ 关注AR酱,
和我们一起发现闪闪发光的AR从业者!
黑猫酱

对女司机,女程序员要心怀敬畏。因为人家上辈子一定都屌爆了

玩体感游戏时,Kinect误解手势或者肢体动作的情况并不罕见,玩家会因为游戏的失利而感到懊恼。
而假如无人机错误地识别了障碍物,那也许就将面临坠机的厄运了。
传感器和AI是越来越厉害了,可是计算机视觉依然蠢蠢的。
怎么让机器拥有比肩甚至是超过人类的实时空间物体识别能力呢?

一家来自韩国的公司CurvSurf最近公布了名为FindSurface的SDK,使得用户可以快速开发自动3D识别,测量和跟踪的解决方案。
FindSurface

过去,在介绍谷歌的project tango时曾经提到过,通过激光TOF方案,接收器根据接收光的时间计算光程,可以获得深度信息。
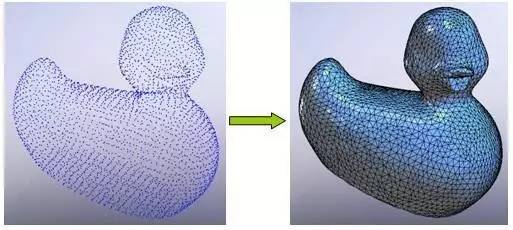
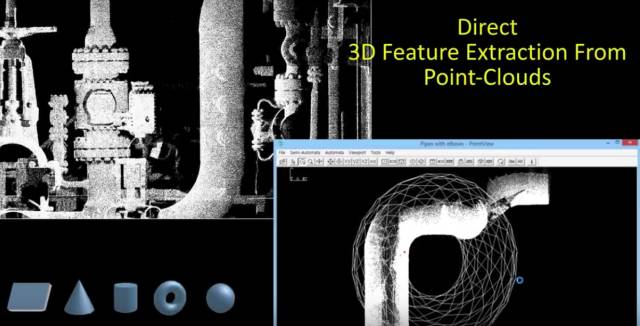
这个深度传感器的输出称为“点云”,包含了所有被采集到的深度的点的三维信息。

上图即是“点云”。
有句话如是说:“万物皆可点云”,因为点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等,通过高密度的点云数据可以还原现实世界。
机器拿到采集自深度传感器的点云之后,就要开始着手三维立体重建了。
首先对采集得到点云数据进行预处理,包括去噪点、简化得到物体的点云模型。
接下来按照传统的办法,要对空间点云进行网格化和优化,得到重建的网格模型;最后对网格进行纹理处理,得到物体的三维实体模型。
许多算法首先要检测物体的边缘,然后沿着边缘勾画轮廓,最后再估计形状,但是这种方法在估算边缘的时候一不小心就会切到其他物体上,容易出错。并且传统算法在将数据从点云转换成3D数据时,非常耗时。
大家想象一下,你自己在看某个场景时,会像机器这样对物体进行识别吗?
很显然这不是正常人的识别方式。人类看物体一般是先宏观再微观,先判断形状、颜色,把这个部分和其他物体区分开,再判断物体类型。
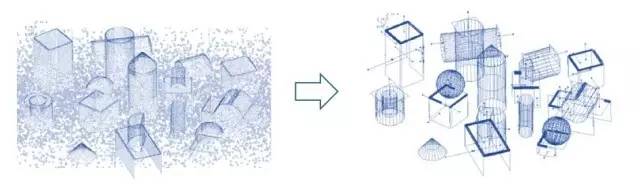
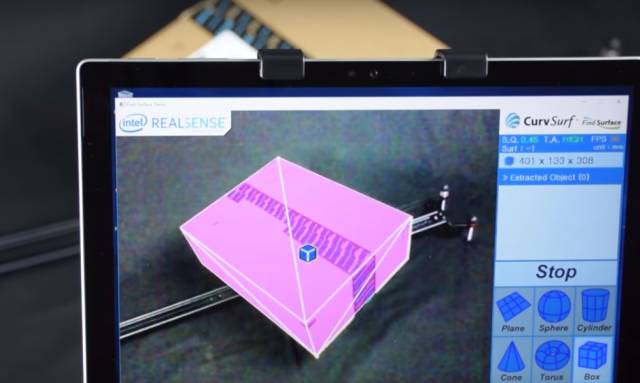
FindSurface SDK的工作原理则与人脑很相似,首先,它直接读取点云,以选择几何“原始”,如框,平面,球体,圆柱体,锥体,圆弧面。之后,它计算每个对象的维度信息,包括位置,方向,大小,半径,体积等。
FindSurfa的核心构架由三个算法模块组成:对象识别,点分割和模型拟合,直接跳过了传统算法中很复杂的一部分,并且精度会更高。
CurvSurf作为一家软件公司,并不负责传感器和硬件的开发,FindSurfase可以很好的被纳入市场上好的应用设备上,比如tango的平板电脑。甚至在 ARkit上也能使用
使用ARkit生成的点云

FindSurface运行速度很快,一方面是不需要进行诸如网格划分的数据处理,并且它所采用的机器学习方法比计算繁重的深度学习更有效率,可以支持该SDK运行于移动设备上,实时地进行几何识别和三维重建。
应用
在增强现实方面,FindSurface可用在AR眼镜上,实时获得建筑物高度等数据信息。

可以提取管道的3D信息,让工作人员更直观的了解设备内部的工作情况,并且可以模拟拼接管道的拼接操作。
CurvSurface还能提高物流效率

计算机视觉如何为用户提供更快运输、低花费的高品质物流服务呢?
扫快件时:

以往需要人工耗时耗力地进行包裹、分类。

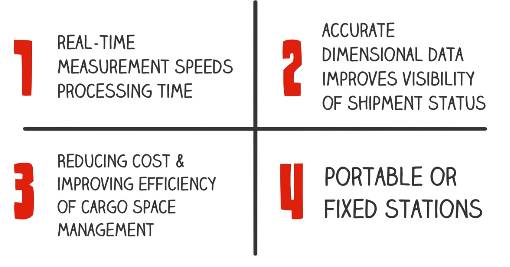
通过FindSurface,将快递包裹扫描就可以得到包裹的形状和大小数据,以方便将不同形状和体积的分好类,再运输。
除了可以节省快件揽件时的操作成本以外,准确的尺寸数据能提高物流装运的准确度,对空间进行合理地运算,使得空间利用率最高,减少运输陈本,最终物流公司将会获得更高的利润。
在软件、建筑工程、历史文物保护方面FindSurface还会有许许多多的应用空间。
目前,FinSurface并不是一款消费者软件,而是为了并入其他应用程序而设计的。
尽管目前软件只能识别六种形状,显得非常稚嫩,但是这种仿生人类思维模式的方向是正确的,将会让我们的智能设备更加智能。
最后,FindSurface SDK的安装和使用介绍:
https://developers.curvsurf.com/docu.jsp#SimpleDemo

来啊,加群啊!
QQ群:158841761
AR酱原创
转自微信号AR酱(ARchan_TT)
并附上原文链接
阅读推荐

“呐,做 AR VR,最重要的就是开心啦”
梦想重要,开心也重要
当你有有趣的想法时,也要来AR酱上
和我们一起分享啊

关注一下好不好

点击下方“阅读原文”留下联系信息





