![]()
本文对几个典型城市作战应用项目进行分析,总结了无人集群在城市作战应用中的优势,归纳了美国在此应用中的研究现状,剖析了其面临的关键技术挑战,并分析了其发展趋势。
摘 要:近年来,美国国防部及各军种联合国防工业界相关部门大力推动各类无人集群项目在城市作战中的研发测试工作。本文通过对“进攻性蜂群使能战术”(OFFSET)项目、“快速轻型自主性”(FLA)项目、“班组X实验”(Squad X)项目等几个典型城市作战应用项目进行分析,总结了无人集群在城市作战应用中的优势,归纳了美国在无人集群城市作战应用中的研究现状,剖析了其面临的关键技术挑战,并分析了无人集群在城市作战应用的发展趋势。
关键词: 无人集群;城市作战;人工智能;人机协同
引 言
随着无人技术、智能自主技术的大力发展,无人集群系统在城市作战的作用愈发明显。美国高度重视无人集群在城市作战中的应用研究,美国国防先进研究计划局(DARPA)先后安排了多个典型城市作战应用项目。
-
2015年启动了开发小型无人机先进感知和自主算法的“快速轻量自主”(Fast Lightweight Autonomy,FLA)项目[1];
-
2016年启动了提升步兵态势感知、精准打击能力的“班组X实验”(Squad X)项目[2];
-
2017年启动了打造城市无人蜂群作战能力的“进攻性蜂群使能战术”(OFFensive Swarm-Enabled Tactics,OFFSET)项目[3]。
从无人平台的自主智能、无人集群与士兵的协同、无人集群协同战术等多个不同侧面进行攻关,通过人工智能、自主技术、虚拟现实及增强现实技术等提升无人作战单元在城市作战战场上的综合作战能力。
本文通过对城市作战特点及无人集群应用前景、国外研究现状、关键技术等进行综合研究分析,总结归纳无人集群城市作战应用发展趋势。
1. 城市作战特点及无人集群应用前景
城市作战是现代战争的一种主要形态,城市环境中高楼密布、街巷纵横、地下基础设施复杂、电磁环境恶劣。城市作战具有以下特点:
城市作战中,防守一方可以凭借林立的高楼和四通八达的地下管廊建立坚固的堡垒,利用地形优势居高临下、以点控面、组织攻击,并可以在市区内为敌方设置各种障碍,延缓攻击进程;而进攻一方常常需要短兵巷战、攻坚战斗,但由于地形、环境、敌情等获取困难,易被伏击,为适应战斗需要,常常需要集武器攻击、突破障碍、火力支援等于一体,并能够灵活机动。
在城市环境中,受大型建筑物等的影响,有线通信机动性差,而无线通信的通信信号容易被干扰、遮挡,这给指挥控制带来了极大的困难。由于通信指挥困难,武器之间、作战人员之间协同困难,易于单打独斗,不易于协同作战。
由于城市的复杂环境,现有的大型武器装备在城市作战的能力被大大削弱,对于大范围侦察装备,难以发挥“看得远”的优势;对于远距离火力攻击装备,在容易隐藏、伪装的城市区域,难以发挥“打得准”的优势;而大型主战装备在城市环境中的机动性差,易被攻击,使用受限。
智能无人集群作为一种颠覆性技术,一直被视为各国无人系统人工智能的核心,是未来智能无人系统的突破口,也是形成非对称武器装备,实现弯道超车的杀手锏技术[4-5]。以大量微小型无人机为载体形成作战力量可为复杂环境下的城市作战提供新质作战手段。
无人集群具有智能化程度高、越障能力强、机动灵活、成本低等特点,可应用群体战术,在城市空间执行自主侦察探测、自主目标识别、自主任务协同等,可以分布式协同为战斗人员提供战场全局态势分析,同时可以分布式协同智能决策,大大减轻作战人员的工作量同时降低人员伤亡概率,具有极大的应用价值。
城市作战环境复杂,密集的建筑易降低传感器效能,干扰甚至阻断GPS等通信信号,影响态势感知能力。美国军方高度重视智能无人装备在城市作战中的应用,DARPA启动多个项目,积极探索无人系统在城市作战中的应用,从顶层设计、项目规划、理论研究、关键技术攻关、试验验证等方面积极促进这一领域的快速发展。
美国国防先进研究计划局(DARPA)安排了“进攻性蜂群使能战术”(OFFSET)项目、“快速轻型自主性”(FLA)项目、“班组X实验”(Squad X)项目等多个典型城市作战应用项目,并积极促进相关成果在各军种的实战化应用转化。
DARPA的“进攻性蜂群使能战术”(OFFSET)项目起源于“第三次抵消战略”[6],美国防部设想通过大量无人集群压制敌防空系统,基于美空军作战人员利用手势控制无人集群的作战想定,OFFSET的总体目标是通过250个以上无人平台(包括无人机、无人车等)的相互协作,在大型建筑、狭窄空间和有限视野等通信、传感、机动性受限的城市环境条件下,在6小时内在8个街区执行任务,为城市作战的局部战斗提供关键作战能力。
DARPA于2016年12月发布OFFSET初始概念[7]。2017年1月,DARPA公布了项目跨部门公告(BAA)初稿。总体构想是,发展蜂群战术开发生态系统及支撑性的开放系统架构,包括先进的人-蜂群界面,让用户可同时实时监控和指挥数百套的蜂群无人平台;构建实时、联网的虚拟环境,支持基于物理的蜂群战术游戏;开展社群驱动的蜂群战术交流,通过有人管理、访问受限的项目门户提供应用程序,帮助参与者设计蜂群战术、蜂群行为及蜂群算法。
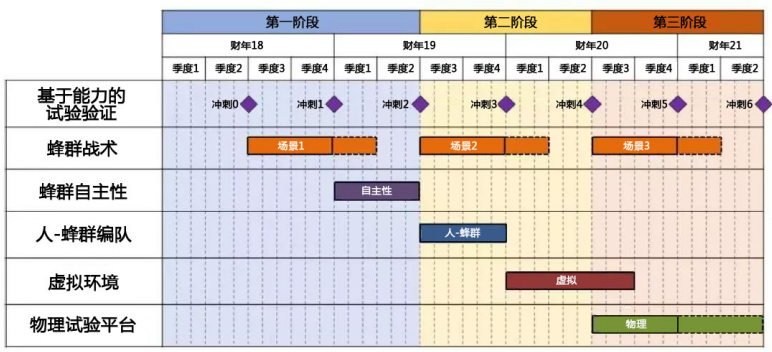
融合新兴技术和力量的原则贯穿于蜂群冲刺竞逐的全生命周期中。五个核心冲刺阶段中的每一个都关注一个或多个OFFSET要旨或关键主题领域:蜂群战术、蜂群自主、人-蜂群协同、虚拟环境和物理试验平台[8]。每个主题都略有不同的侧重点,但最终旨在实现蜂群能力的突破。
项目最终的目标是使用250个或更多的无人系统在(包括无人机、无人车等)8个城市街区自主执行6h的任务。如表1所示。
整个OFFSET研制周期42个月,包含6个一年两次的能力试验,其中项目第一阶段为期18个月,第二、第三阶段分别为期12个月,并每半年进行一次项目冲刺,每次冲刺结束后将开展虚拟和物理试验,对取得的成果进行专业测试和整合评估。如图1所示。
![]()
目前,DARPA已发起五次冲刺,并签订了五次冲刺的合同,正在按计划有序推进,具体如下:
第一次冲刺:2017年2月发起,征集增强城区环境下的进攻性集群战术架构研究方案,通过集群系统架构的设计、研发和验证来推动新型集群战术的创新、互动和集成。OFFSET项目第一次冲刺合同授予雷声公司(BBN研发中心)和诺·格公司团队[9]。
第二次冲刺:2017年11月发起,利用现有或开发新的硬件组件、算法以提升空/地无人作战平台的自主性;2018年10月,DARPA第二次冲刺合同授予八个单位,分别是卡内基·梅隆大学、Corenova技术公司、康奈尔大学、赫伦系统公司、密西根理工大学、西门子公司企业技术部、科罗拉多大学博尔德分校和北卡罗莱纳大学夏洛特分校[10]。
第三次冲刺:2018年10月发起,该冲刺侧重于人-蜂群协同和先进蜂群战术两个重点领域。2019年4月,DARPA宣布第四次冲刺中的先进蜂群战术合同授予内基·梅隆大学和腾飞科技有限公司[11];2019年8月,DARPA宣布人-蜂群协同交互合同授予凯斯西储大学、查尔斯河分析公司和西北大学[12]。
第四次冲刺:2019年3月发起,该冲刺包括两个主题:一是在OFFSET虚拟环境中开发综合技术;二是利用人工智能(AI)以发现和学习新的集群战术。2019年9月,DARPA宣布第四次冲刺合同授予八个单位,其中,虚拟环境的合同授予约翰·霍普金斯大学应用物理实验室、密西根理工大学,人工智能应用合同授予卡内基梅隆大学、查尔斯河分析公司、纽约州立大学研究基金会/纽约州立大学布法罗分校、西门子、腾飞科技有限公司和空间集成系统[13]。
第五次冲刺:2019年9月发起,该冲刺包含两个主题:一是集群物理试验平台;二是城市环境中的集群实战战术。2020年4月DARPA宣布第五次冲刺合同授予九个单位,其中,物理试验平台合同授予密西根理工大学、约翰·霍普金斯大学应用物理实验室、HDT远征系统公司、哨兵机器人和德州农工大学,集群战术合同授予密西根理工大学、查尔斯河分析公司、腾飞科技有限公司和西北大学[14]。
FLA项目旨在开发先进的自主算法,使得无人空中或地面平台能够在室内、地下或人为干扰等无法使用GPS的环境下执行任务[15-16]。该技术的潜在应用包括:在军队进入之前,安全快速地扫描建筑物内部的威胁;在丛林密集地区或敌对领域的丛林中寻找被击落飞机的飞行员;或在地震或者灾难后,对幸存者进行定位。
FLA项目于2015年发布,总体构想是,采用小型四轴无人飞行器(重量5磅左右,约合2.3 kg),利用机载高分辨率摄像机、激光雷达或惯性测量器件等,在无遥控信号、GPS或任何数据链的引导下实现自主导航,并以每小时45英里(1 英里=1.609 344 km)的速度自主穿越布满建筑物和障碍物的环境。
FLA项目不是为了开发新的传感器技术,或者通过增加计算能力来解决自主导航和障碍物规避问题,其关键是使用低成本的惯性测量单元和现货四旋翼无人机来满足能力需要,因此该项目更侧重于开发一种实时高速、能够与小型低功耗单板计算机共同工作的新算法。
配备FLA算法的无人系统,通过搭载的机载软件、轻型处理器和低成本传感器实时自主完成所有工作。通过FLA算法,无人系统在战场上形成有效的人机编队,编队中的小型空中或地面系统自主搜索未知环境,带回有用的侦察信息给编队中的人类成员。由于无需与发射平台搭建通信链路,这就降低了对手利用无线电传输来探测己方部队的可能性,进一步提高了安全性。
目前,FLA项目已开展两个阶段试验,第一阶段演示验证了无人平台的自主导航和障碍规避算法,第二阶段验证了可将小型空中和地面系统进行编队的先进算法。FLA项目开发的算法预计将转交陆军研究实验室,以进一步开发其潜在军事应用。
2017年7月,DARPA在佛罗里达州中部开展了FLA项目第一阶段任务试验,进行了一系列障碍物飞行验证测试。该试验持续四天,有三支受DARPA支持的研究团队参加了试验。这次飞行试验测试了研究团队的算法在真实条件下的能力和稳健性,例如从户外到较暗建筑物内部的快速调整,感知和规避树木,在简单迷宫中导航和长途穿越未知区域等。在最后一天,无人机必须穿过一个林木茂盛的区域和一个敞亮的停机坪,寻找并进入一处光线较暗的机库,绕开机库内的墙和障碍,找到一个红色化学桶,然后返回起点。整个过程全部由无人机自主完成。由于传感器和算法的原因,三支团队在不同的路线上表现出了各自的优势和劣势。一些团队的无人机室内规避障碍的能力较强,其他无人机则在穿越树林或户外开阔地带时表现出色。
2018年7月,DARPA FLA项目成功完成第二阶段飞行试验,演示验证了可将小型空中和地面系统进行编队的先进算法。基于2017年开展的第一阶段飞行试验,研究人员对软件进行了改进,并采用了商用传感器,以便在更小、更轻的四轴飞行器上实现更高的性能。试验结果表明,在城市户外及室内的自主飞行中都取得了重大进展,具体包括:在识别感兴趣目标的同时,以更快的速度穿越多层建筑物及狭窄小巷;穿过狭窄的窗户进入建筑物,沿走廊寻找房间并创建内部3-D地图;以及识别楼梯,沿其向下飞行,并通过敞开的门离开建筑物。
Squad X项目项目旨在开发一支以人工智能为真正合作伙伴的作战部队,通过研发和集成无人机、无人车、先进传感器和机器学习等新技术,使之成为班组的外延力量[17]。在城市战场空间,利用无人机、无人车的感知和自主能力,可使小型作战单位提高其对威胁的感知与响应能力。在这些作战场景中,无人机和无人车将同其他班组成员一样,凭直觉行动。无人机可以感知作战区域,无人车则可以在没有遥控或更多监管的情况下像班组正常成员一样行进,让单个士兵或海军陆战队队员获得超人般的战场感知能力。
2014年7月,DARPA发布Squad X项目白皮书,构想通过集成移动传感器生成可识别敌/友军3D作战画面的新技术。2016年3月,DARPA正式启动Squad X项目,开发两个模块,分别是“变形班组增强频谱态势感知与独立定位”(ASSAULTS)系统与“电子攻击模块”(BEAM)。
ASSAULTS系统,通过在自主地面系统与自主空中系统中配备实时及模拟的电子监视工具、地面雷达和基于摄像头的传感器,对班组前方、侧方及四周区域进行安全侦察,并将结果报给班组成员手持“安卓战术攻击套装”(ATAK)。
BEAM模块,配备于轻型战术全地形车辆和“美洲狮”(Puma)无人机,与分布在试验场周围的背包节点进行通信。
“班组X实验”项目通过在空中和地面上使用无人系统(包括无人机、无人车等)以建立几百米范围的感知警戒线。项目提出几种可能的无人系统概念:用于空中侦察的无人机,用于地面侦察机器人,以及执行工程任务的地面机器人。项目着力在以下四个领域开展研究:
1)距离步兵班1000m以外的危险感知,包括自主危险探测。
2)即使无法获得GPS服务时,步兵班人员也可以确认自身及班组成员位置,定位误差不超过20英尺(1英尺=0.3048 m)。
3)利用诸如分布式非视距瞄准与制导弹药等能力,对1000m外目标进行精确打击。
4)袭扰敌方的控制与通信链,并根据步兵班的作战节奏使用无人资产。
目前,通过与其他军种合作,Squad X项目得以迅速发展。“变形班组增强频谱态势感知与独立定位”(ASSAULTS)系统已开展两次试验,“电子攻击模块”(BEAM)已开展三次试验。
2018年11月,洛·马公司的“变形班组增强频谱态势感知与独立定位”(ASSAULTS)系统以及CACI公司的“电子攻击模块”(BEAM)开展首次试验,成功演示验证了其能有效增强小型徒步步兵作战单位的态势感知能力。前者致力于提升班组的态势感知能力,后者致力于提升班组的情报与侦察能力。
2019年初,DARPA联合位于加利福尼亚州二十九棕榈村的美海军陆战队空地作战中心,再次开展“班组X实验”(Squad X)项目战场试验,积极推进“班组X实验”项目发展。此次试验演示验证了两个能力互为补充的人工智能和自主系统与步兵班组协同作战的能力,使作战人员可在复杂、时敏型作战环境下作出更好的决策。
此次试验结束后,CACI的系统将进入第二阶段,包括进行系统升级,使其可持续运行5h以上;洛·马公司的系统将在2019年秋开展下一次试验。美陆军将在Squad X第二阶段完成后继续其对CACI系统的开发工作。此外,陆军还计划在2019、2020财年与DARPA同时开发洛·马公司的ASSAULTS系统,并在2021财年进行该系统的独立开发。
在密集城市环境中的作战行动中是一项复杂的系统工程,小型地面部队必须针对动态环境和敌人进行机动、防御和作战。部队通常对此类作战所在区域的基础设施、供应链、当地条件和潜在威胁等方面了解很少,且接入和/或控制严重受限,因而,执行行动困难重重。这些密集城市区域特别需要未来连级及以下地面部队在建制分布式或分散式无人系统能力方面取得进步。在该方面,核心是无人集群的自主技术,具体包括无人集群可进行自主集群任务规划、集群航路规划、协同数据处理等。
任务决策就是在满足任务时间、任务空间、无人平台资源、无人平台运动性能等约束条件下,如何将合适的任务交给合适的无人平台在合适的时间去完成,使得某种作战效能指标达到最优(如时间最短、资源消耗最少、占据最大战场优势等)。任务规划本质上是一个复杂的组合优化问题,可建模成非线性动态规划、混合整数非线性规划问题。随着异构集群中无人平台数目和作战任务数目的增大,组合优化问题会产生数据爆炸,问题求解速度将变得很慢。因此,任务决策技术的难点是如何设计合适的组合优化求解算法,以实时得出任务决策。
航路规划就是在考虑战场环境、无人平台运动性能和任务协同等约束条件下,为无人平台设计合适的从初始位置到目标点或任务区域的飞行航路,使某种性能指标达到最优(如时间最短、航路最短等),以更高效地完成指定任务。航路规划问题本质上是一个多约束非线性最优控制问题,该问题只能利用数值算法进行求解,得到其次优解。当集群规模较大、战场环境较复杂时,航路规划问题也面临数据爆炸的难题。因此,航路规划技术的难点是如何设计合适的近似算法,以实时准确地解算出高动态高复杂度战场环境下各无人作战平台的最优运动航路。
由于城市空间内环境复杂,无人平台存在交互效率低、个体识别率低等技术难题,因此多无人机、多目标交互式感知技术以及多源、多精度图像信息融合技术成为无人集群的关键。多无人机、多目标交互式感知技术通过接收和处理来自多个信息源的多目标数据,根据多架无人机的位置对单个节点的感知任务进行高效分配。通过任务计算资源自动分配、目标属性关联等方法,可达到多机对多目标任务实时自动分配效果,解决传统多机分布式感知效率低的关键技术问题。多源、多精度传感器图像融合就是运用数据融合技术综合不同传感器和不同分辨率图像的信息来克服单个传感器系统所固有的缺陷,利用不同传感器的数据互补和冗余,实现目标的定量识别、定位识别和定性识别,为目标识别提供更多可利用的判别信息。
目前,现有小型低成本无人机在平台定位、速度/高度估测等方面对操纵人员、GPS导航系统具备很强的依赖性,否则将难以持续飞行。而复杂的城市环境,需要无人机或无人车辆能够在没有人类操作员、GPS或任何数据链的引导下自主运行。在该方面,核心是无人平台的智能自主技术,具体包括无卫星无测控链路的通信导航定位、自主建图、自主目标识别等。
目前无人机的位置与速度的估计广泛采用全球定位系统和惯性导航系统实现,然而在城市建筑物内等无GPS信号情况下,很难实现无人集群的定位。因此,进行飞行器无GPS信号的导航技术研究对于飞行器自主飞行有重要意义。目前的研究实现了一定条件下的无GPS的无人机定位,但也存在相应不足:只能估计飞行器的速度无法得到飞行器的位置信息,需要已知飞行环境并提前在地面布置外部导航系统以及需要建立精确的系统模型,对处理器运算能力要求高,而小型飞行器由于受自身载荷有限,板载计算能力较弱,无法使用过于复杂算法。需要进一步加强算法研究,实现真正无GPS和通讯链路下的无人机高精度导航定位是无人集群城市作战应用的关键。
城市空间环境复杂,基于同时定位于制图(SLAM)技术是无人集群在未知环境下作业的核心关键技术。未知环境下,基于机载摄像机及传感器获取外部环境数据,SLAM为无人机构建周围环境,同时提供无人机在环境中的位置,并随着机器人的移动而进行增量式构建于连续定位,是实现机器人环境感知与自主作业的基础。SLAM中一般采用视觉传感器作为环境感知的数据源,视觉传感器具有体积小、功耗低、信息获取丰富等特点,可为无人机提供丰富的外部环境纹理信息。
对于城市环境下目标机动立体作战,感知系统可作为各类武器系统的重要信息源。攻克基于低功耗人工智能芯片的智能化目标(人员、武器等)识别与定位技术、非合作人脸识别、人员身份识别与行为判断技术、低功耗嵌入式应用条件下人工智能深度神经网络优化压缩与剪裁技术,可有效的完成对低空、地面目标实现快速检测、识别和特征提取任务。同时,需要利用人工智能和机器视觉技术,对作战空间内的人员进行人群管理、监视与监控。对无人集群的现场录像进行分类,可以让作战人员更彻底的发现人群中可疑的暴力行为的人。
未来城市作战中,人会远离作战前沿,但不会完全脱离战场,作战人员一方面会与无人集群进行协同作战,另一方面会指挥无人集群进行作战,因此人机协同及人机交互技术是无人集群城市作战应用中的关键技术。
设计融入指挥员决策的、面向城市作战需求的柔性互补人机协同任务规划问题求解方法,更好地完成大规模、动态及不确定环境下的规划预案生成任务,减少指挥员或操作人员的工作强度,提高各个规划目标的规划成功率和效率,是无人集群城市作战应用的迫切需求。已有的人机协同技术存在目标数量庞大时,规划效率低、规划结果成功率低、人机协同不灵活等问题,因此,在满足任务要求的前提下,提高规划速度,提高规划成功率,减少规划的时间成本,获取比传统规划系统生成的方案更优的规划方案是无人集群城市作战应用的关键技术。
由于集群内无人系统数量的众多,传统的无人系统人机交互技术应用于集群具有不少困难。而人机交互技术是实现集群操作/指挥人员对集群实时状态感知、集群协同侦察情报感知、集群高效控制的核心技术。为解决集群内大量无人系统状态监控、集群协同侦察情报的高效展现,集群的高效控制,需要开展层次化非完备数据的集群状态感知技术、基于非完备数据的态势生成技术、基于抽象指令的集群指挥控制技术等方面的研究,形成无人集群的地面控制装备。
从美军的多个无人集群城市作战应用项目可以看出,美国军方高度重视这一领域发展,注重通过顶层设计提升蜂群系统能力,同时,研究部门注重跟军方合作,提升蜂群的实战化应用能力。其中,
随着人工智能技术的大力发展,美军各城市作战应用项目纷纷利用人工智能技术赋能城市作战中的无人平台和系统,提升蜂群的智能自主化能力水平,各个项目从不同侧重点进行关键技术攻关,包括无人集群群体智能技术、无人平台的智能自主技术、人机协同与人机交互技术等方面。
-
其中,OFFSET项目的侧重点在于无人集群的群体智能技术方面,其关键使能技术包括蜂群战术、蜂群自主性和人-蜂群编队。其第四次冲刺的一个主题是利用人工智能(AI)以发现和学习新的集群战术。该主题代表了利用人工智能技术加速集群战术设计,通过在OFFSET增强虚拟环境中利用人工智能框架来发现、学习和强化新型集群战术,包括通过神经进化、强化学习、迁移学习等方法推动群体战术发展,提高人工智能生成的群体战术的鲁棒性等。
-
FLA项目的侧重点是在无人平台的智能自主技术方面,强调无人机或无人车辆通过随平台携带的传感器进行自主建图、自主导航定位、自主识别目标和自主规避障碍物等。
-
“班组X实验”项目的侧重点是在人机智能协同方面,通过人工智能及自主技术增强班组作战单位在战场上的作战能力。
4.3 通过仿真试验促进蜂群战术的创新、交互、集成
在无人集群的城市作战应用技术发展过程中,通过计算机仿真技术可以节约成本,缩短系统的研发周期。在各个项目中,美国注重通过先虚拟仿真后试验测试的方式,加速技术成果的应用转化。
OFFSET项目的参与者分为两类,一类是负责工程的系统集成商,其任务是创建OFFSET架构、接口及其分布对应的集群战术交换中心,其维护的工具库帮助其他项目参与者设计集群战术;另一类参与者更关注任务本身,并提供自己的专项技术与系统集成商进行整合以便对集群自主战术与技术进行集成和测试,其中第一类即为仿真支撑环境,基于该仿真支撑环境进行蜂群战术的创新、交互和集成,强调形成持续敏捷开发和集成部署优势[18]。
FLA项目通过自主算法的仿真和集成测试,提升无人平台的智能自主能力。
结语
在城市作战应用方面,美军正在不断扩大无人集群的应用研究,强化基于无人集群的实战化应用能力的形成,通过对无人集群协同战术、无人平台自主能力水平、无人集群人机协同及人机交互水平的提升,拓展无人集群系统在城市作战中的应用能力,提升整体作战效能。未来,在城市作战应用中,无人集群可用于情报监视侦察、排雷防爆、通信中继、电子战、火力支援等等领域。无人集群系统将不再是简单用于降低作战人员危险的辅助工具,而将改变未来城市作战的游戏规则的主要装备。
【参考文献】
[1] Root P. Fast Lightweight Autonomy (FLA) (Archived) [EB/OL]. [2020-04-08].https://www.darpa.mil/program/fast-lightweight-autonomy.
[2]MAJ Christopher Orlowski, Ph.D. Program Manager. Squad X Experimentation Program. DARPA Tactical Technology Office
[3]DARPA. OFFSET Proposers-day[EB/OL]. (2017-01-30).http://www.darpa.mil/news-events/offset-proposers-day.
[4]杨中英,王毓龙,赖传龙.无人机蜂群作战发展现状及趋势研究[J],飞航导弹,2019, 404(5): 34-38.
[5]刘丽,王森,胡然.美军主要无人机集群项目发展浅析[J],飞航导弹,2018, 403(7): 37-43.
[6]王亚林,张洋.第三次抵消战略:美国恢复全球力量投送能力之策.国际航空,2015(1): 32-34.
[7]DARPA. OFFSET Envisions Swarm Capabilities for Small Urban Ground Units[EB/OL]. (2016-12-07).http://www.darpa.mil/news-events/2016-12-07.
[8]https://www.swarmtex.com/news/offensive-swarm-enabled-tactics-offset.
[9]DARPA. OFFSET “Sprinters” Encouraged to Share Innovative Ideas for Swarm Systems[EB/OL]. (2017-10-12). http://www.darpa.mil/news-events/2017-10-12.
[10]DARPA. OFFSET Seeks Proposals for Third OFFSET Swarm Sprint, Awards Contracts for Second[EB/OL]. (2018-10-12). http://www.darpa.mil/news-events/2018-10-12.
[11]DARPA. OFFSET Seeks Proposals to Accelerate Swarm Tactics in Virtual Enviroments[EB/OL]. (2019-04-01).http://www.darpa.mil/news-events/2019-04-01.
[12]DARPA. Teams Test Swarm Autonomy in Second Major OFFSET Field Experiment[EB/OL]. (2019-08-07). http://www.darpa.mil/news-events/2019-08-07.
[13] DARPA. DARPA Seeks Novel Urban Swarm Capabilities, Enhancements to Physical Testbeds[EB/OL]. (2019-09-27).http://www.darpa.mil/news-events/2019-09-27.
[14]DARPA. OFFSET Awards Contracts to Advance Swarm Tactics for Urban Mission, Enhance Physical Testbeds[EB/OL]. (2020-04-13).http://www.darpa.mil/news-events/2020-04-13.
[15]Paschall S, Rose J. Fast, lightweight autonomy through an unknown cluttered environment: Distribution statement: A — Approved for public release; distribution unlimited[C]//2017 IEEE Aerospace Conference. Big Sky: IEEE Press, 2017: 1-8.
[16]DARPA. Faster, lighter, smarter: DARPA gives small autonomous systems a tech boots[EB/OL]. (2018-07-18).http://wwww.darpa.mil/news-events/2018-07-18.
[17] Root P. Squad X Core Technologies (SXCT) (Archived)[EB/OL]. [2020-04-08]. https://www.darpa.mil/program/squad-x-core-technologies.
[18]DARPA. Teams Test Swarm Autonomy in Second Major OFFSET Field Experiment[EB/OL]. (2019-08-07).http://www.darpa.mil/news-events/2019-08-07.
![]()
![]()