《综述:多智能体系统(MAS)中的任务分配技术》美国空军项目支持
I. 简介
II. 任务分配技术的不同通信方案
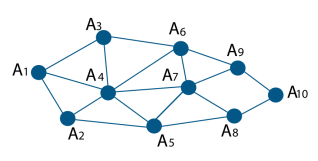
A. 集中式任务分配
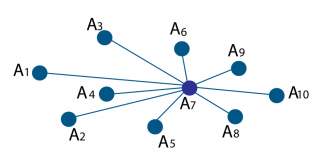
B. 分布式任务分配
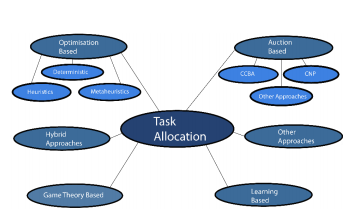
III. MAS任务分配中的不同算法
A. 基于拍卖的算法
专知便捷查看
便捷下载,请关注专知人工智能公众号(点击上方蓝色专知关注)
后台回复“TAMAS” 就可以获取《《综述:多智能体系统(MAS)中的任务分配技术》美国空军项目支持》专知下载链接



登录查看更多
相关内容
Arxiv
0+阅读 · 2022年11月21日
Arxiv
0+阅读 · 2022年11月19日


相关VIP内容
相关资讯