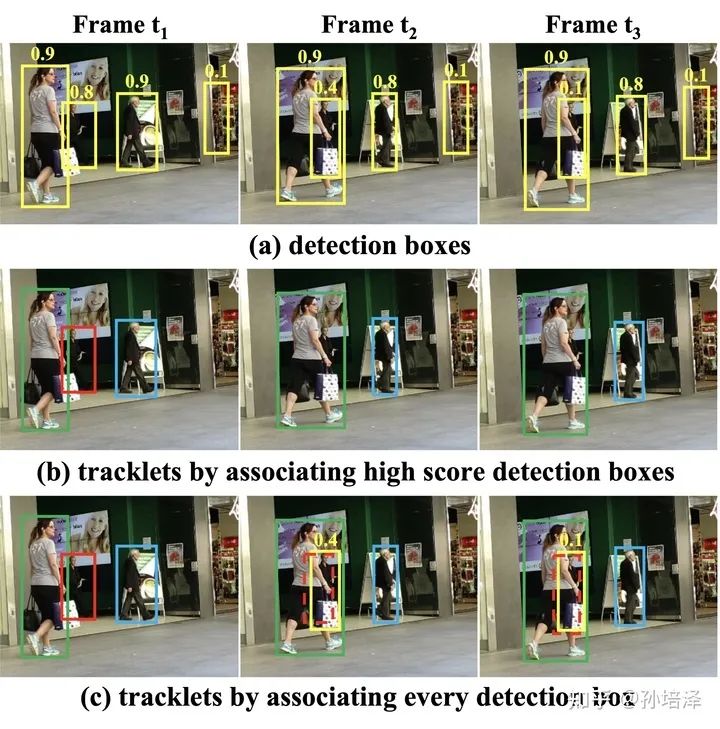
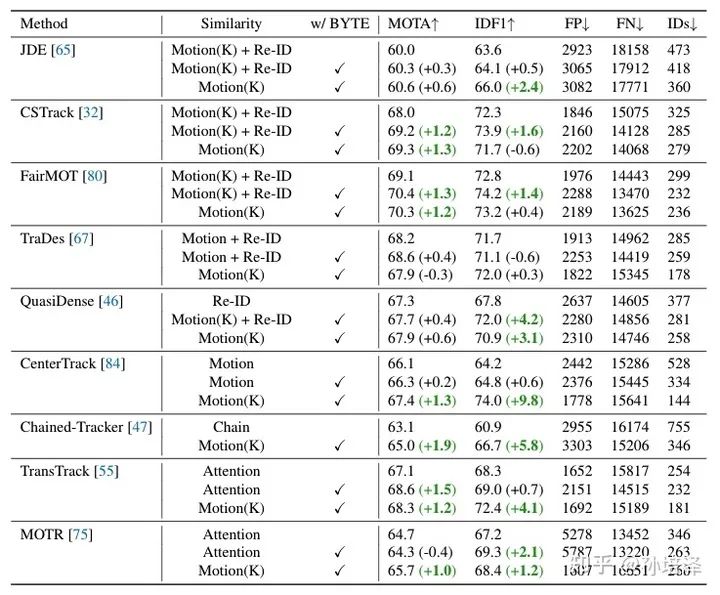
为了解决之前方法丢弃低分检测框的不合理性,我们提出了一种简单、高效、通用的数据关联方法BYTE (each detection box is a basic unit of the tracklet, as byte in computer program)。直接地将低分框和高分框放在一起与轨迹关联显然是不可取的,会带来很多的背景(false positive)。BYTE将高分框和低分框分开处理,利用低分检测框和跟踪轨迹之间的相似性,从低分框中挖掘出真正的物体,过滤掉背景。整个流程如下图所示:
(1)BYTE会将每个检测框根据得分分成两类,高分框和低分框,总共进行两次匹配。
(2)第一次使用高分框和之前的跟踪轨迹进行匹配。
(3)第二次使用低分框和第一次没有匹配上高分框的跟踪轨迹(例如在当前帧受到严重遮挡导致得分下降的物体)进行匹配。
(4)对于没有匹配上跟踪轨迹,得分又足够高的检测框,我们对其新建一个跟踪轨迹。对于没有匹配上检测框的跟踪轨迹,我们会保留30帧,在其再次出现时再进行匹配。
我们认为,BYTE能work的原因是遮挡往往伴随着检测得分由高到低的缓慢降低:被遮挡物体在被遮挡之前是可视物体,检测分数较高,建立轨迹;当物体被遮挡时,通过检测框与轨迹的位置重合度就能把遮挡的物体从低分框中挖掘出来,保持轨迹的连贯性。
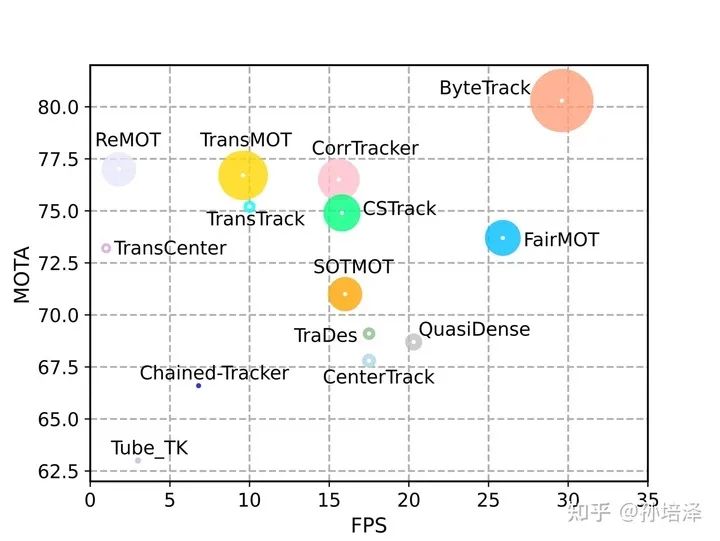
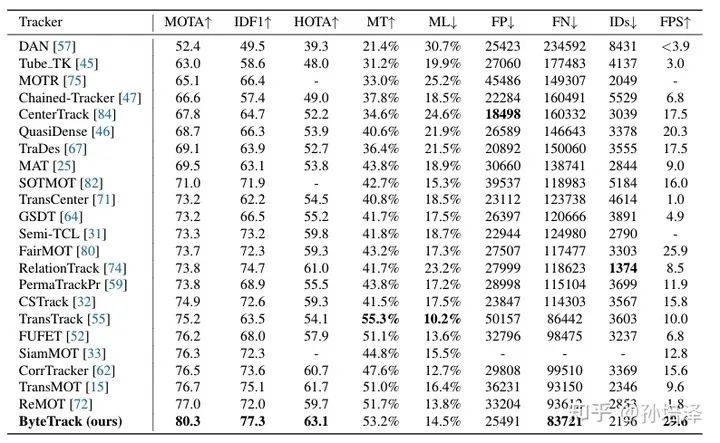
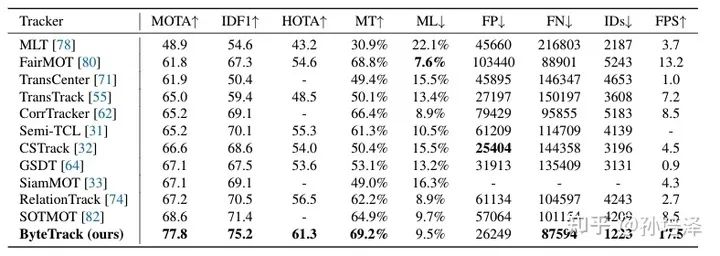
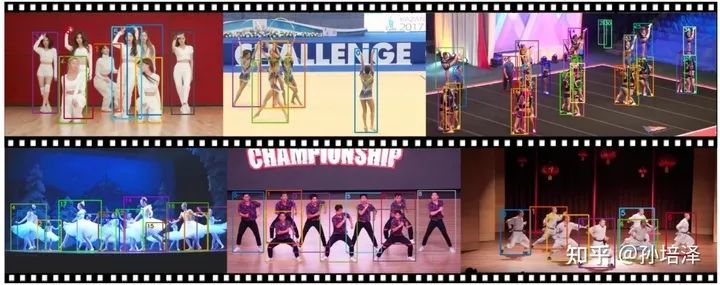
ByteTrack在MOT17,20的表现启发我们重新思考多目标追踪中的运动模型与re-ID模型。当前众多跟踪模型强依赖于提取物体的外观特征,那如果追踪物体的外观基本一致时,现有模型的的表现如何?当前主流多目标跟踪数据集中物体的运动模式非常简单,近乎匀速直线运动,如果物体的运动模式非常复杂,多个物体互相来回穿梭,现有模型的的表现如何?我们提出了一个数据集:
DanceTrack: tracking multiple objects in uniform appearance and diverse motion