缠成一坨的耳机线,这机器人两下就能解开
Pine 发自 凹非寺
量子位 | 公众号 QbitAI
明明自己已经整理过了,数据线却还是绕成一团。
这像不像耳机从你的包里刚取出来的样子。

现在不用怕了!加州大学研究出了一款机器人,可以轻松理顺数据线。

有网友对这个研究结果“相见恨晚”:
就不能在Air Pods出来之前训练出这个机器吗?
有了这个机器人,就再也不怕那“不听使唤”的线了。
机器人整理这些缠绕的线,它是怎么工作的呢?
工作原理
双手机器人通过感知即将处理的线,使用两个夹钳来理顺它们。
在整理线的过程中,机器人的特殊构造以及各个系统等都要起到很重要的作用。
首先是它的夹钳结构,这个夹钳(PC)触手既可以钳式(pinch-pinch)抓取,又可以笼式(cage-cage)抓取,也可以二者相结合(pinch-cage)。

△图注:中间为笼式抓取,右边为钳式抓取
钳式抓取时线不能任意滑动,而笼式抓取和两者结合抓取时,线能够滑动。
笼式抓取可以在解结操作中用到,钳式、笼式结合抓取一般用来检测线有没有打结。
多种抓取模式可以让机器人进行更多的操作,并且很适合整理较长的线。
其次是机器人的感知系统,它可以获知整理线的过程中这条线的“状态”:缠绕方式,打结的数量,何处打结··· ···从而影响机器人的后续操作。
具体来说,感知系统包括端点探测,实时追踪线,结点探测等。
端点探测是指感知要整理的线的两个端点,确保可以进行下一步操作。
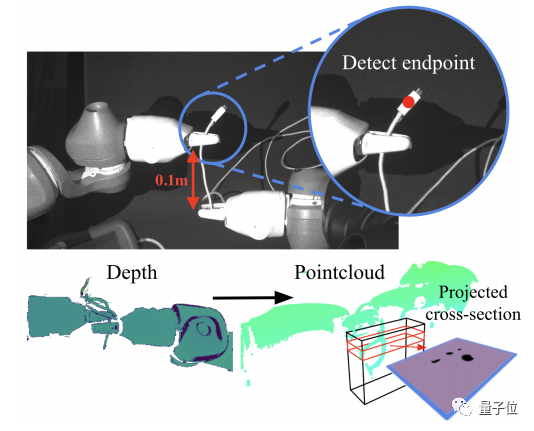
实时追踪线是通过传感器来探测整条线,从起点开始,追踪到交叉点就停止。
节点探测是用于检测整根线中的结点个数,单纯的交叉点并能不算在其中。
感知到要处理的线的“状态”之后,就意味着要进行操作了。
那么在整理的时候,两个抓手都可以进行什么操作(操作指令)呢?
1、Reidemeister移动:这个操作是在整理时的第一个动作,两个抓手抓住两端的结点,然后将其拉向两端,使线上的打结处都展现出来。
2、摇晃:晃动缠绕的线主要有两个用处,其一是当线的两端很难找到,无法进行Reidemeister移动时,通过晃动来寻找端点,其二是摇晃可以使打结处松动,更利于后续操作。
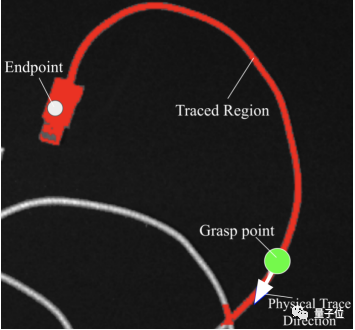
3、物理跟踪:整理线时,需要一个臂紧抓住线的一端,另外一个臂滑动追踪打结处。
4、结点隔离:当解开上一个结时,就要立即执行这个操作,把已经处理好的部分拨到一边。
5、双笼分离:这个是解开打结处的一个重要动作,两个抓手抓住节点内的两点,然后向两端拉开,结就打开了
了解完这波机器人的操作指令后,就可以来看看这些指令是怎么运用到实际操作中的?
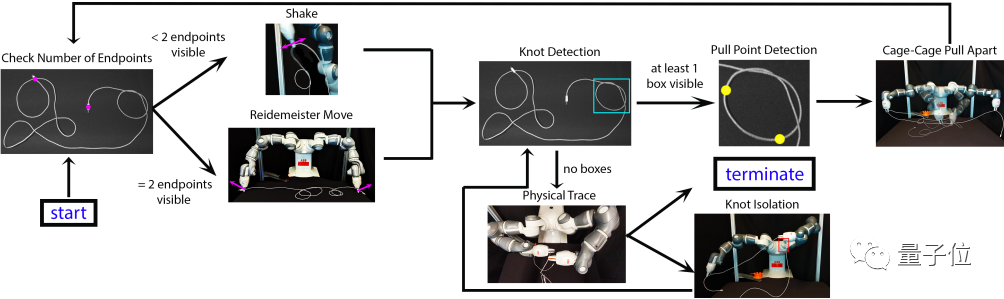
整个理线的核心就是抓滑系统(Sliding and Grasping for Tangle Manipulation,简称SGTM),通过抓取和滑动等一系列操作来解开缠绕的线。
SGTM从识别端点开始。如果两个端点都可见,那么它将继续进行Reidemeister移动(指令1)。
如果看不到端点,它就会晃动(指令2)线,直至可以探测到两个端点,然后进行Reidemeister移动。
接下来会用感知系统进行结探测,如果遇到结,执行双笼分离操作(指令5)以解开它,然后返回第一步。
如果没有检测到结的存在,将执行物理跟踪(指令3),这次跟踪未检测到结的存在的话,线就整理完毕。
但若在物理跟踪时发现额外的结,则该结被隔离(指令四)并放置在工作空间中,算法返回到结探测步骤。
读到这里,机器人如何整理缠绕的线我们也都明白了。
那么它整理这些线的效果如何?
最长可整理3米的线
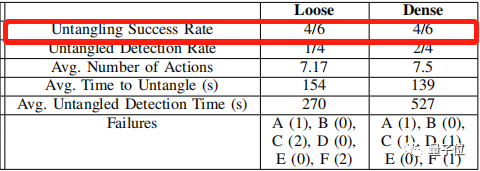
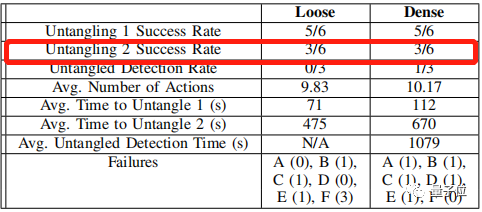
在加州大学团队的研究中,这个机器人最长可成功解开3米的数据线。
并且当线中存在一个结时,机器人解开的成功率为 67%,存在两个结时,解开的成功率为 50%。
如果你感兴趣的话,可以戳下文链接了解更多~
参考链接:
[1] https://twitter.com/vainavi_v/status/1553829336515416064
[2] https://sites.google.com/view/rss-2022-untangling/home
[3] https://arxiv.org/abs/2207.07813
— 完 —
「人工智能」、「智能汽车」微信社群邀你加入!
欢迎关注人工智能、智能汽车的小伙伴们加入我们,与AI从业者交流、切磋,不错过最新行业发展&技术进展。
ps.加好友请务必备注您的姓名-公司-职位哦~

点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~



