为什么机器人企业的算法工程师需要ROS开发经验
ROS的英文全称是Robot Operating System,即机器人操作系统。TA集成了各种工具、库以及规定,以便简化在各种平台下进行机器人开发的复杂性,为开发者提供了一个自由而宽松的框架,专门用来开发机器人的应用。
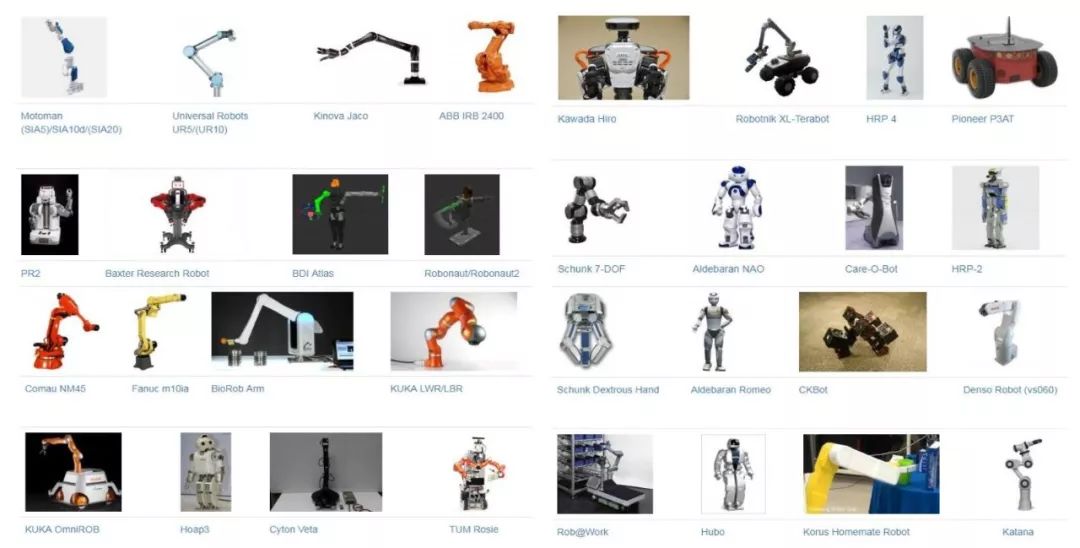
图1 支持ROS的部分机器人
从2007年发展至今,ROS已成为世界上应用范围最广的通用机器人软件开发平台,这主要得益于其通用性、开源性、复用性、社区性等特点。目前全球都点燃了ROS编程热,机器人研究者们可以使用其他ROS用户贡献出的大量ROS package来编程,社区的功能包数、关注度和文章成指数型变化。
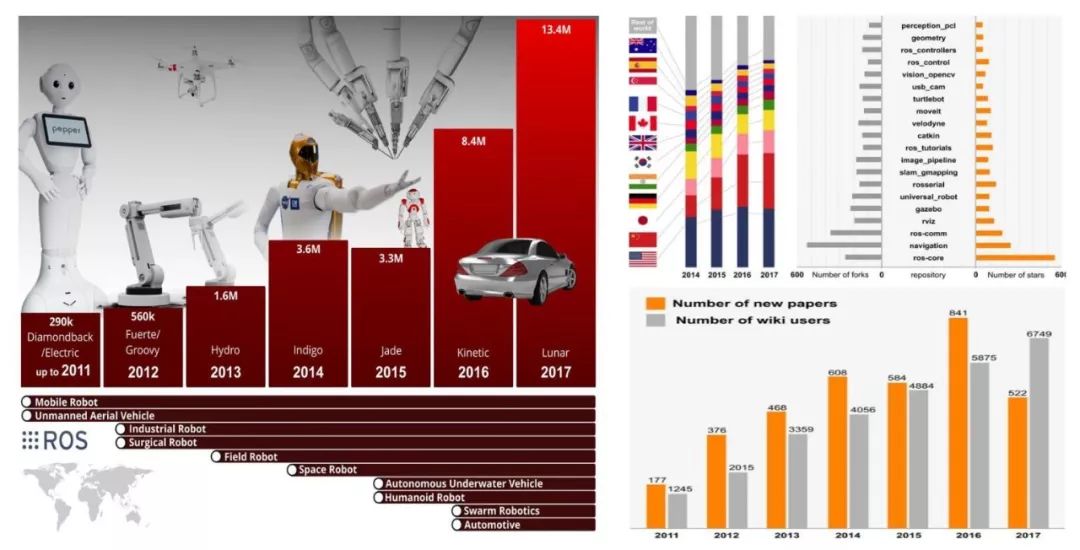
图2 ROS社区的功能包数、关注度和文章变化
ROS已经涵盖了导航定位(SLAM)、3D物体识别、运动规划、多关节机械臂运动控制、机器学习等,甚至可以让机器人协同完成打桌球、人机互动等高难度组合动作。除了我们熟知的百度Apollo无人车是基于ROS开发的,新松机器人、大疆、地平线等诸多机器人或者无人驾驶的企业在招聘ROS软件开发工程师,或者具备ROS开发经验的算法工程师。
为了尽快掌握ROS基础,并实践基于ROS的机器人常见任务(机器感知、SLAM自主导航、机械臂控制),专注于前沿科技在线教育的深蓝学院,联合知名机器人博客“古月居”博主古月老师,推出《机器人操作系统ROS理论与实践》在线系列课程。课程每章节均安排有作业及参考资料,根据作业打分评选优秀学员,优秀学员可获得证书,并推荐到实习就业。
课程讲师

胡春旭(古月),知名机器人博客“古月居”博主,主编书籍《ROS机器人开发实践》,深圳星河智能科技有限公司联合创始人,华中科技大学自动化学院硕士。目前主要从事机器人控制系统的研究开发。
作为国内最早一批ROS开发者,具备多年开发、应用经验,参与研发过轮式移动机器人、机械臂等机器人产品。曾获开源硬件与嵌入式大赛机器人组全国冠军,飞思卡尔杯智能汽车竞赛全国一等奖,中国人工智能机器人学术会议十佳论文等奖项。
课程特色
1. 理论结合实践,降低入门门槛;
2. 课上在线答疑,课下微信群答疑;
3. 作业设置新颖,批阅讲解仔细;
4. 优秀学员获颁证书,推荐实习就业;
5. 课程PPT和代码,提前公布下载。
课程目录
1. 认识ROS
1.1 课程介绍
1.2 ROS简介
1.3 ROS系统架构
1.4 ROS安装
1.5 第一个ROS例程——小海龟仿真
2. ROS基础
2.1 创建工作空间
2.2 ROS通信编程
2.2.1 Topic编程
2.2.2 Service编程
2.2.3 Action编程
2.3 实现分布式通讯
2.4 ROS中的关键组件
2.4.1 Launch启动文件
2.4.2 TF坐标变换
2.4.3 Qt工具箱
2.4.4 rviz可视化平台
2.4.5 gazebo物理仿真环境
3. 机器人系统设计
3.1 机器人的定义与组成
3.2 机器人系统构建
3.2.1 执行机构
3.2.2 驱动系统
3.2.3 传感系统
3.2.4 控制系统
3.3 URDF机器人建模
3.3.1 URDF模型
3.3.2 创建机器人模型
3.3.3 添加传感器
4. 机器人仿真
4.1 机器人模型优化
4.1.1 xacro文件格式
4.1.2 xacro的可编程特性
4.1.3 URDF模型的优化
4.2 ArbotiX+rviz功能仿真
4.3 gazebo物理仿真
4.3.1 ros_control
4.3.2 创建仿真环境
4.3.3 机器人仿真
4.3.4 传感器仿真
5. 机器人感知
5.1 机器视觉
5.1.1 ROS中的图像数据
5.1.2 摄像头标定
5.1.3 ROS中的OpenCV接口
5.1.4 人脸识别/物体识别
5.1.5 二维码识别
5.2 机器语音
5.2.1 ROS集成科大讯飞SDK
5.2.2 实现智能语音助手
6. 机器人SLAM与自主导航
6.1 机器人必备条件
6.2 ROS中常用SLAM功能包的应用
6.2.1 gmapping SLAM
6.2.2 hector SLAM
6.2.3 ORB_SLAM
6.2.4 google cartographer SLAM
6.3 ROS中的导航框架
6.4 导航框架的应用
6.4.1 本地规划器与全局规划器的配置
6.4.2 Gazebo导航仿真
7. MoveIt!机械臂控制
7.1 MoveIt!系统架构
7.2 创建机械臂模型
7.3 Setup Assistant配置机械臂
7.4 添加机器人控制器
7.5 MoveIt!编程学习
7.6 Gazebo机械臂仿真
7.7 ROS-I框架介绍
8. ROS机器人综合应用
8.1 ROS机器人实例介绍
8.1.1 PR2
8.1.2 TurtleBot
8.1.3 HRMRP
8.1.4 Kungfu ARM
8.2 构建综合机器人平台mbot
8.2.1 移动机器人+机械臂
8.2.2 综合应用
9. ROS 2.0
9.1 为什要有ROS 2
9.2 什么是ROS 2
9.3 如何安装ROS 2
9.4 ROS 2中的话题与服务编程
9.5 ROS 2与ROS 1的集成
9.6 课程总结与展望
报名咨询
课程费用499元,现在报名可领取 100元立减优惠券 ;课程采用在线授课,一年内可以随时回放。
请添加工作人员「深蓝学院」助教报名
回复“算法与数学之美”领取优惠码