拯救“帕金森”!光学防抖原来这么强?
前几天vivo正式发布了X50系列,其中搭载的微云台技术引起了热烈讨论,哪怕是对手机拍照一窍不通的小白,也会被宣传视频中大幅转动的镜头吸引过去。
作为一项迥异于传统手机光学防抖的技术,大家都对微云台有一肚子的疑问。vivo官方虽然在媒体沟通会中解释了这项技术的原理,但对于一部分小伙伴来说,还是有些过于复杂了。
小绮简单解释下,就是以往手机的光学防抖是基于镜头实现的,CMOS传感器在固定位置,而vivo X50呢,则是让包括传感器在内的整个相机模组动了起来,效果更上一层楼。
听上去确实有那么点“手持云台”的味道了,而在进一步了解它之前,小绮想先带着大家回顾一下光学防抖的历史。
相机中的光学防抖
最早的光学防抖当然是基于相机来做的,一个是尼康的VR,另一个是佳能的IS,两家相机厂商都在镜头端实现了图像稳定的功能。
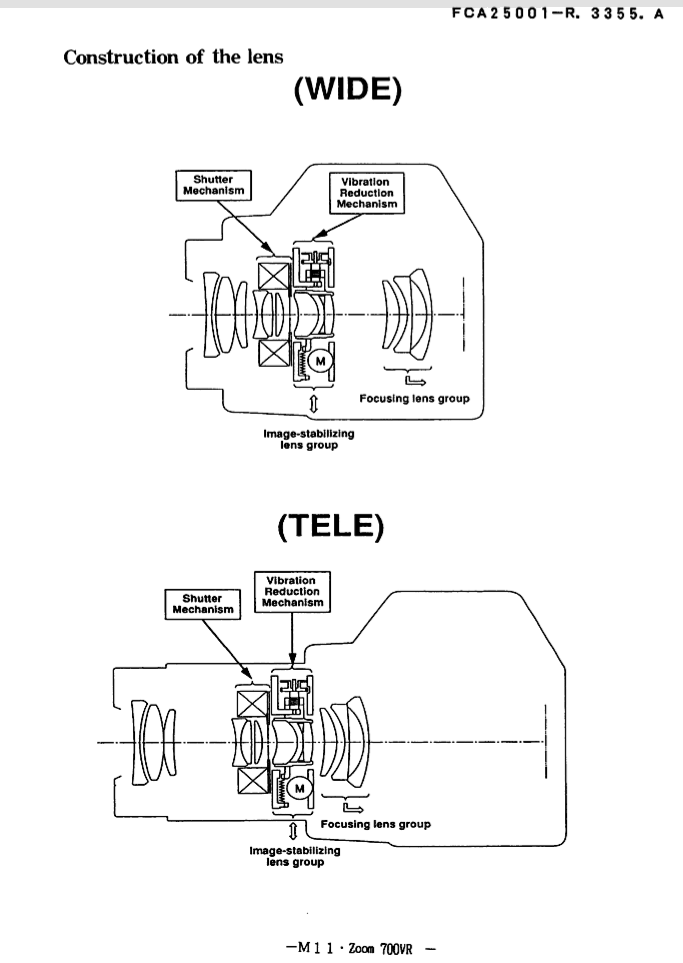
上面是1994年发布的尼康Zoom 700VR设计图,可以看到它的镜头附近有两个模组,一个是减震结构,一个是图像稳定结构,两个结构能够起到X轴与Y轴的防抖功能。
尼康Zoom 700VR虽然是世界上第一台具备光学防抖功能的相机,内置了38–105 mm f/4–7.8变焦镜头,不过由于本身价格奇高,再加上是傻瓜相机,销量并不太理想。
后续佳能和尼康在该相机的基础上推出了带防抖功能的单反镜头,开启了镜头光学防抖的时代。

通过这张动图可以了解到,镜头防抖的基本原理是在中间加入一个浮动的透镜元件和两个陀螺仪传感器,通过检测水平方向和垂直方向的运动,实时反馈到镜头内的CPU,对这块透镜原件进行补偿运动,从而达成稳定图像的目的。
早期的镜头防抖技术比较落后,容易对最后的成像效果产生影响,画质较于不开防抖有一定程度的下降。但随着佳能和尼康在这一技术上的持续不断的研发投入,现在的镜头防抖可以说是非常成熟和稳定了。
既然有镜头防抖,相应的也有机身防抖,不过这项技术出现的时间略晚,直到2003年,美能达DiMAGE A1上才首次用上机身防抖也即传感器防抖的技术。

跟镜头防抖相比,机身防抖的好处是可以用在任何镜头上,不管是新款的数码镜头还是老式的胶片镜头,都可以用上防抖的技术。而且这样一来,镜头中就不用加入复杂的防抖模组,让非麒麟臂的摄影师也能轻松把握镜头+机身的重量。
上图就是机身防抖的简单示意,可以看到,当机身发生运动导致误差时,相机内置的陀螺仪会根据位移来让机身内的传感器做相应的补偿运动,从而达到图像稳定的效果。
机身防抖缺点也不小,由于传感器位移会导致光学取景器中看到的图像晃动,所以只有采用电子取景器的无反相机使用,同时部分镜头因为兼容问题会没办法用上防抖功能。
脑回路快一点的同学已经想到接下来要讲的了,既然同时有镜头防抖和机身防抖,左手Apple右手Pen,两者一结合,岂不美哉?
放到实际操作中来讲困难还是蛮大的,毕竟是两个不同的防抖硬件,要让它们一起协同工作,在镜头和机身的适配上都要考虑很多。
2015年,松下Lumix DMC-GX8正式发布了,在这部相机上,松下引入了一个新功能,就是五轴防抖的机身能和带防抖功能的镜头一起工作,达到更好的图像稳定效果。
至于它的原理可以看这张动图,镜头中的陀螺仪和机身中的陀螺仪同步数据,实时做出抖动的补偿运动,从而达成图像稳定的目的。
相机中的光学防抖主要是分为这三种,当然各家对这项技术的命名各不相同,尼康的叫VR,佳能的叫IS,美能达的叫AS,奥林巴斯的叫IBIS,索尼的叫OSS,松下徕卡的叫MegaOIS和PowerOIS,适马的叫OS,腾龙的叫VC,宾得的叫SR……但在原理实现上都是大同小异,区别并不算大。
手机的光学防抖
提到手机中的光学防抖,必然绕不开一位曾在全球手机市场中叱咤风云的王者——诺基亚。
2011年2月11日,诺基亚在英国伦敦宣布与微软达成战略合作关系,放弃塞班和MeeGo,全面使用Windows Phone系统。
2012年9月发布的诺基亚Lumia 920,就是在这一合作背景下诞生的旗舰手机,集合了诺基亚做手机十几年以来各种黑科技,是当之无愧的机皇,与三星苹果相比毫不逊色。

在众多黑科技中,第二代PureView纯景技术2.0作为最后一款塞班系统手机诺基亚808 PurView的继承者,自然备受瞩目。
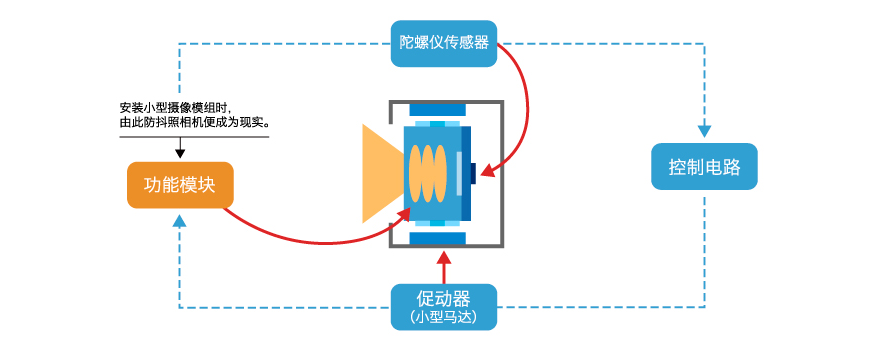
搭载PureView技术的诺基亚Lumia 920,首次在手机相机中实现了光学防抖,它的实现原理大致和之前提到的镜头防抖技术类似,采用陀螺仪来检测手机的位移,将检测到的信息传回ISP(图像信号处理器),再让马达做补偿运动,从而实现图像视频稳定的功能。
在诺基亚之后,HTC One M7上的UltraPixel相机同样获得了光学防抖的加持,不过此时已经是2013年的2月,光学防抖开始在安卓手机上推广开来。
而等到2014年9月,苹果在iPhone 6 Plus上也采用了光学防抖技术,自此之后,苹果开始在自家手机上推广光学防抖,从最初只在5.5英寸的大屏手机上采用到最后全系手机标配光学防抖,它成为了手机中不可或缺的一项功能。

而手机厂商为了宣传自己的光学防抖功能有多神奇与不可思议,可以说是使出了全身解数,而让小绮最难忘记的,还是LG G2在2013年的一支广告。
当时的LG为了宣传自家的Galluscam镜头所搭载的光学防抖功能,特意找了一只名叫丽兹的鸡来拍广告片。

什么斯坦尼康,在这只名为丽兹的鸡面前都弱爆了,不管是摩托车还是划艇,不管是冲浪还是跳伞,戴在鸡头上的摄像头都能拍出惊人的稳定画面。虽然其中用了许多特效,但这支广告片还是充分展示了光学防抖在拍照和录像中的重要意义和作用。

如今手机中光学防抖当然不能与2013和2014时同日而语了,在响应速度和实现效果上有了长足的进步,在大底传感器上加入的光学防抖,让相机即使在极端弱光条件下,依旧能拍出高解析力的照片,让人不禁慨叹科技已经悄然改变生活。
手机光学防抖最强作——微云台

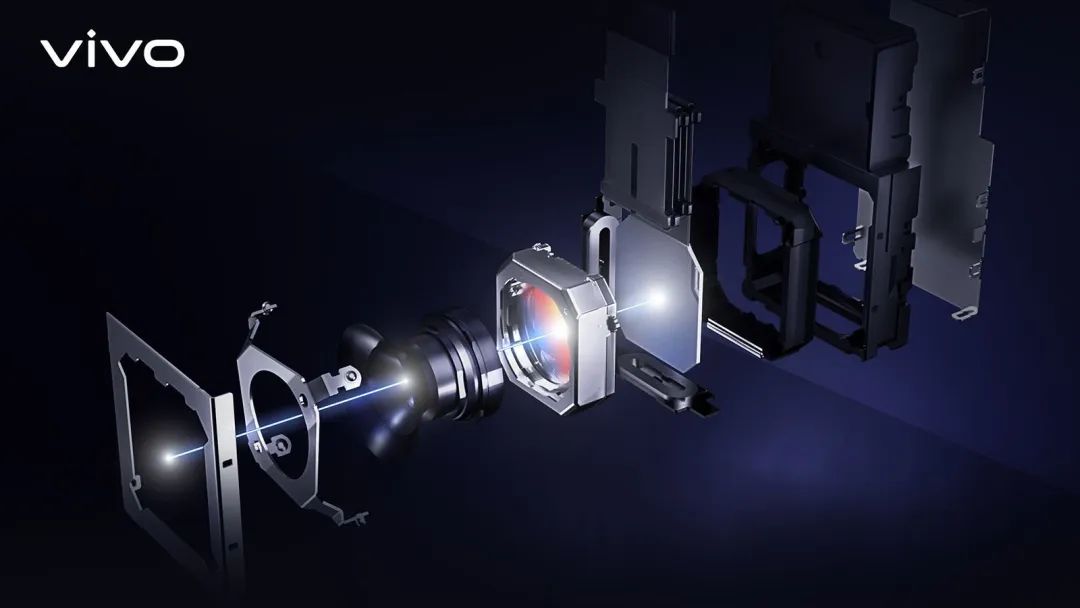
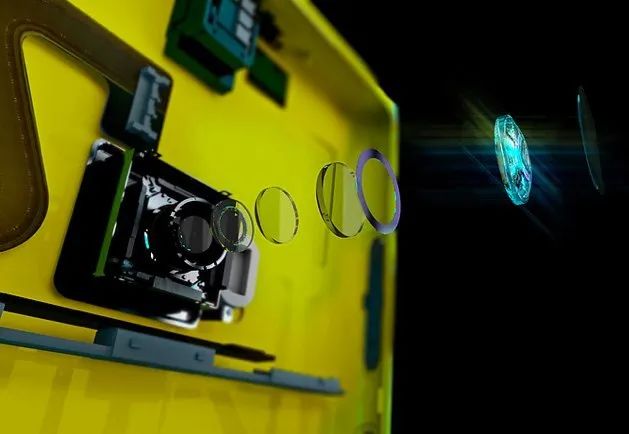
vivo早在APEX 2020这台概念机中已经展示过微云台技术,一个硕大的防抖结构包裹住了整个镜头和传感器,在开启光学防抖后,整个模组可以实现非常大的左右和上下位移。

彼时的微云台已经做得非常惊艳,相较于普通手机的OIS光学防抖,提升了200%的防抖角度,防抖效果非常惊艳。
而在6月1日发布的vivo X50系列上,微云台技术再一次得到了进化,不仅防抖模组体积缩小,放进了纤薄的机身,而且防抖效果也做了进一步优化,从概念到落地成行,vivo只用了3个多月。
从vivo官方分享的视频中可以看到,同样夜间运动的视频场景,普通OIS光学防抖会出现各种画面失真抖动现象,而在微云台技术加持下的vivo X50,真的可以用“稳如老狗,稳若鸡头”来形容了。
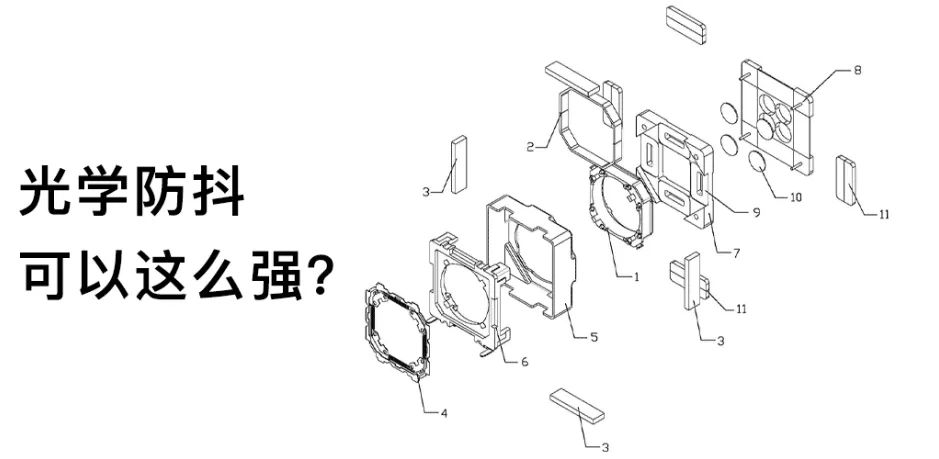
而表现如此优异的微云台内部构造也远比一般镜头模组复杂,根据vivo技术沟通会的负责人介绍,在一个比拇指指甲盖大不了多少的模组里,塞入了双滚珠悬架、镜头、音圈马达、双S型FPC排线、T-FPC和磁动力框架等元器件,集成度极高。

小绮也仔细研究了一下,总的来说,vivo这个微云台用到的是之前提过的传感器防抖原理,再具体技术层面做了很多细节上的优化,将各种元器件小型化微型化后塞进了手机里,比之普通手机OIS的镜头防抖原理,自然效果拔群,但由于模组原因,目前只能实现XY轴上的两轴光学防抖。
跟普通手机相比,微云台当然有几个明显的好处,比如防抖效果更佳,开启光学防抖后,边缘画质不会劣化,以及夜景中的安全快门时间能变得更长。

但劣势也同样突出,就是整个模组太大,即使经过缩小,也比一般OIS的光学防抖大得多,受限于这个原因,微云台只能搭载在那些CMOS尺寸较小的手机镜头中,这也是vivo X50 +没有使用微云台技术的最大原因。想想本就非常庞大的传感器和镜头外面再加上一圈防抖模组,不管是对手机的主板设计,还是背部的整体美感,都会造成很大的影响。
当然,这项技术并非没有进步的空间,像日本电产株式会社在之前CES上展出的TiltAC技术,同样利用了传感器防抖的原理,防抖角度达到了±6°,相较于微云台的±3°,录像和拍照中的防抖效果自然会更好,只是这项技术目前似乎还未正式投产。
有人把微云台技术称作为“帕金森克星”,这也不是没有道理,现在的手机加个壳贴个膜,重量妥妥地接近半斤,没有麒麟臂的普通人想拿稳手机,还真不是件易事。
希望类似微云台这类防抖技术能够推广到更多手机上,让随手出片不再是纸上的泛泛而谈,而是能“飞入寻常百姓家”,化成清脆的手机快门声。

『热门推荐』









