【泡泡一分钟】无地图驾驶的深层语义车道分割
每天一分钟,带你读遍机器人顶级会议文章
标题:Deep Semantic Lane Segmentation for Mapless Driving
作者:Annika Meyer, N. Ole Salscheider, Piotr F. Orzechowski, and Christoph Stiller
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:王嫣然
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在自动驾驶系统中,尽管街景经常变化,但高精度地图被认为是不可避免的。然而,一个更好的系统是为自动驾驶汽车配备一个传感器系统,使之能够在没有精确地图的情况下进行导航。本文提出了一种新的基于深度神经网络的检测方法,该方法可以检测给定RGB图像的车道语义和拓扑结构。在此方法的基础上,仅从支持无地图自动驾驶的传感器设置中提取道路场景信息。除了取代创建和维护高精度地图所需的巨大代价外,本文提出的系统也减少了对精确定位的需求。

图1 来自Cityscape数据集的车道语义分割示例。路上的阴影和消失的标记使得自行车道(绿色)以及并行车道(黄色)的检测变得困难,但是本文方法能够正确的估计车道边界和语义信息。它还可以正确地判断逆向车道(红色)。
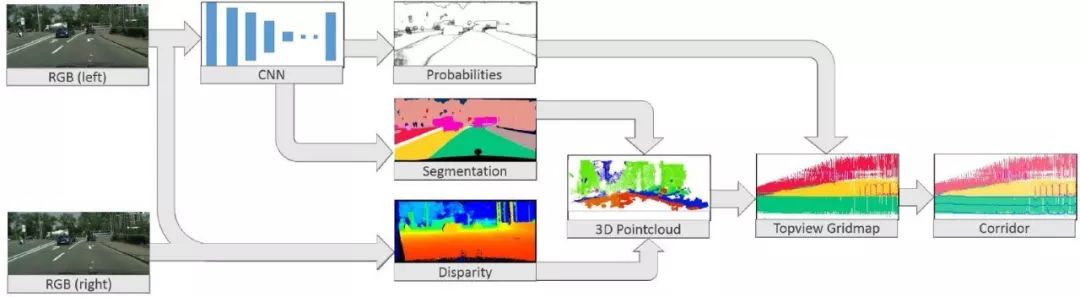
图2 无地图驾驶在自行车道上的感知过程。使用神经网络将立体系统的左侧图像分割出车道。使用右侧的RGB图像生成语义3D点云,并将其转换为网格映射。生成的道路通过网格地图单元指定自我标签。
本文使用扩展的城市场景数据集,展示了准确的自行车道检测,以及用于自动驾驶的挑战性场景的车道语义。
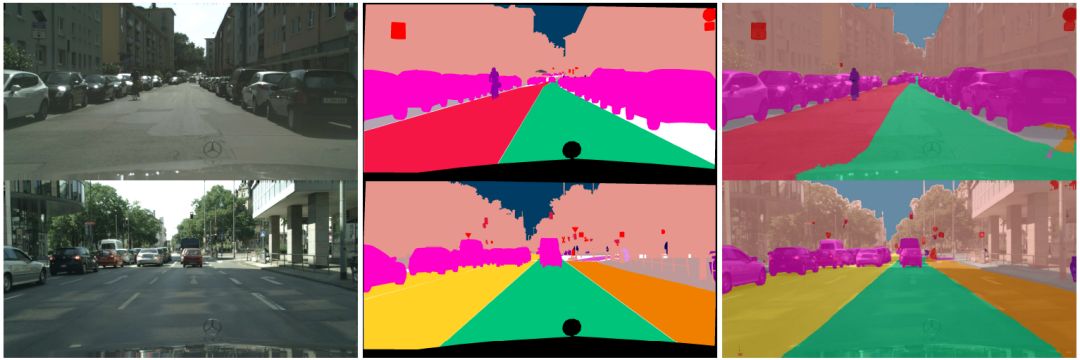
图3 无地图驾驶车道分割效果图。

Abstract
In autonomous driving systems a strong relation to highly accurate maps is taken to be inevitable, although street scenes change frequently. However, a preferable system would be to equip the automated cars with a sensor system that is able to navigate urban scenarios without an accurate map. We present a novel pipeline using a deep neural network to detect lane semantics and topology given RGB images. On the basis of this classification, the information about the road scene can be extracted just from the sensor setup supporting mapless autonomous driving. In addition to superseding the huge effort of creating and maintaining highly accurate maps, our system reduces the need for precise localization.
Using an extended Cityscapes dataset, we show accurate ego lane detection including lane semantics on challenging scenarios for autonomous driving.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




