【泡泡图灵智库】SL(3)上的基于点和线特征的观测器设计用于Homography估计及其在图像稳定性中的应用
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Point and line feature-based observer design on SL(3) for Homography estimation and its application to image stabilization
作者:Minh-Duc Hua, Jochen Trumpf, Tarek Hamel, Robert Mahony, Pascal Morin
来源:HAL
编译:张国强
审核:李建华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——SL上的基于点和线特征的观测器设计用于Homography估计及其在图像稳定中的应用,该文章发表于HAL。
本文提出了一种新的算法,用于在线估计一系列图像的单应性,适用于从配备单目相机的机器人车辆获得的图像序列。该方法利用了一组单应性的特殊线性组SL(3)结构以及陀螺仪测量和图像之间的直接点和线特征对应,为单应性估计开发了时间滤波器。提供了理论分析和实验结果来证明该算法的鲁棒性。即使在非常快的相机运动(相对于帧速率)以及存在严重遮挡,镜面反射,图像模糊和光饱和的情况下,实验结果也表现出优异的性能。
主要贡献
1.提出的观测器不是使用[6]中的基于Lyapunov的技术,而是基于最近的非线性观测器设计的先进理论直接在输出空间上推导出来的[10]。
2.即使没有足够的数据用于使用代数技术完全重建单应性,该算法也能很好地运行。在这种情况下,我们提出观测器继续运作,纳入可获得的信息,并在必要时依靠先前估计的信息。
3.所提出的算法整合来自一系列图像的信息,并且通过观测器的自然低通响应来过滤各个特征对应中的噪声,从而产生高度稳健的估计。
算法流程
1.基于二维点和线对应的SL(3)非线性观测器设计
SL(3)的表示为:

所有测量值均以相机当前帧表示:
上式可以表示为:

2.SL(3)上的观测器设计:
使用黎曼梯度变换的标准规则和黎曼度量是右不变的事实,我们可以得到:
由上式可得:
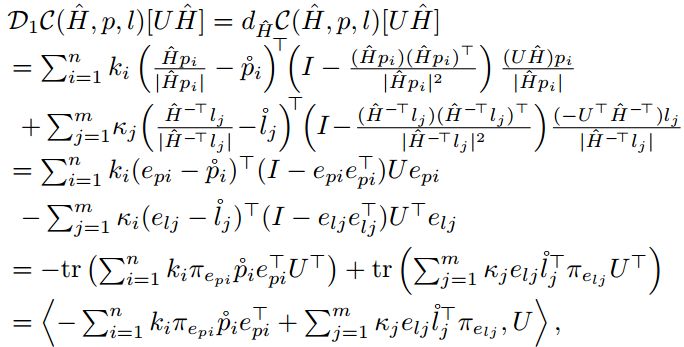
然后我们从以上两式可计算出:


主要结果
1、匹配算法测试
我们简单快速的异常值去除方法产生了非常显着的匹配结果,因为测试序列没有或很少有异常值。

图1 图像帧264(由预测的单应性扭曲)与参考帧之间的匹配点对应关系
线特征检测和匹配:使用概率Hough变换[13]和OpenCV的HoughLinesP例程提取线要素。然后将图像坐标中的每个提取线(由均匀坐标中的两个点P1和P2给出)变换为本文中使用的线表示(即,包含场景线和相机焦点的平面的法线)。

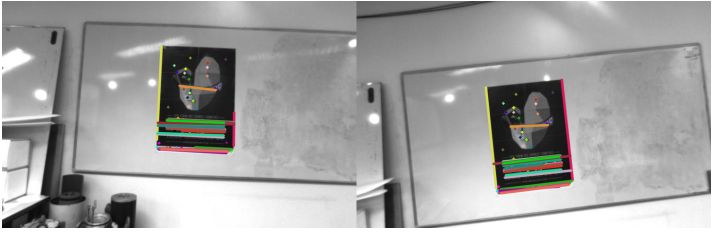
图2 图像帧169(右)和参考帧(左)之间的成功线匹配
与点匹配问题相比,参考图像和当前图像的两组线的匹配更加复杂并且在文献(和OpenCV)中几乎没有发展。 但是,请记住,在大多数情况下,我们具有“良好”匹配的点特征,已经开发了以下简单线匹配算法。
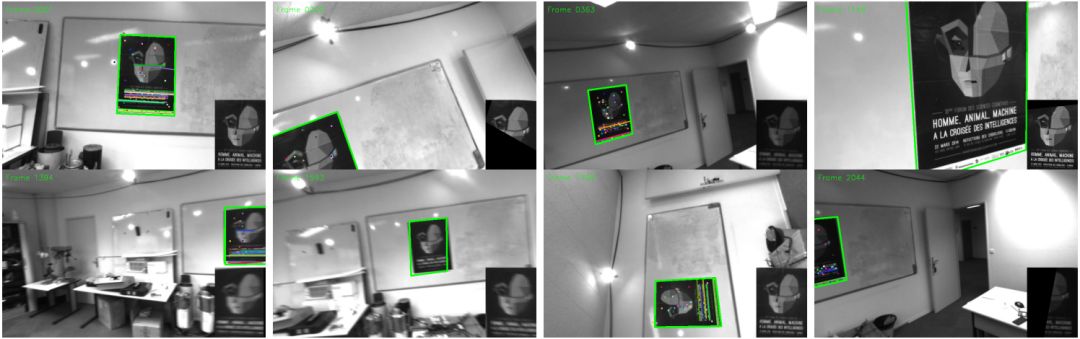
图3 我们的算法具有良好而强大的性能,可实现非常快速的相机运动
性能评估:实验结果(在整个视频序列中表现出良好且稳健的性能,包括前面提到的具有严重遮挡,镜面反射,由于模糊和/或光饱和度(见图3)。 即使暂时没有可用的特征对应或者当我们的算法选择错误的特征匹配集时,观测器仍继续跟踪感兴趣的区域, 并迅速从任何跟踪错误中恢复。

Abstract
This paper presents a new algorithm for online
estimation of a sequence of homographies applicable to image sequences obtained from robotic vehicles equipped with a monocular camera. The approach taken exploits the underlying Special Linear group SL(3) structure of the set of homographies along with gyrometer measurements and direct point- and linefeature correspondences between images to develop temporal filter for the homography estimate. Theoretical analysis and experimental results are provided to demonstrate the robustness of the proposed algorithm. The experimental results show
excellent performance even in the case of very fast camera motion (relative to frame rate), and in presence of severe occlusion, specular reflection, image blur, and light saturation.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

商业合作及转载请联系liufuqiang_robot@hotmail.com





