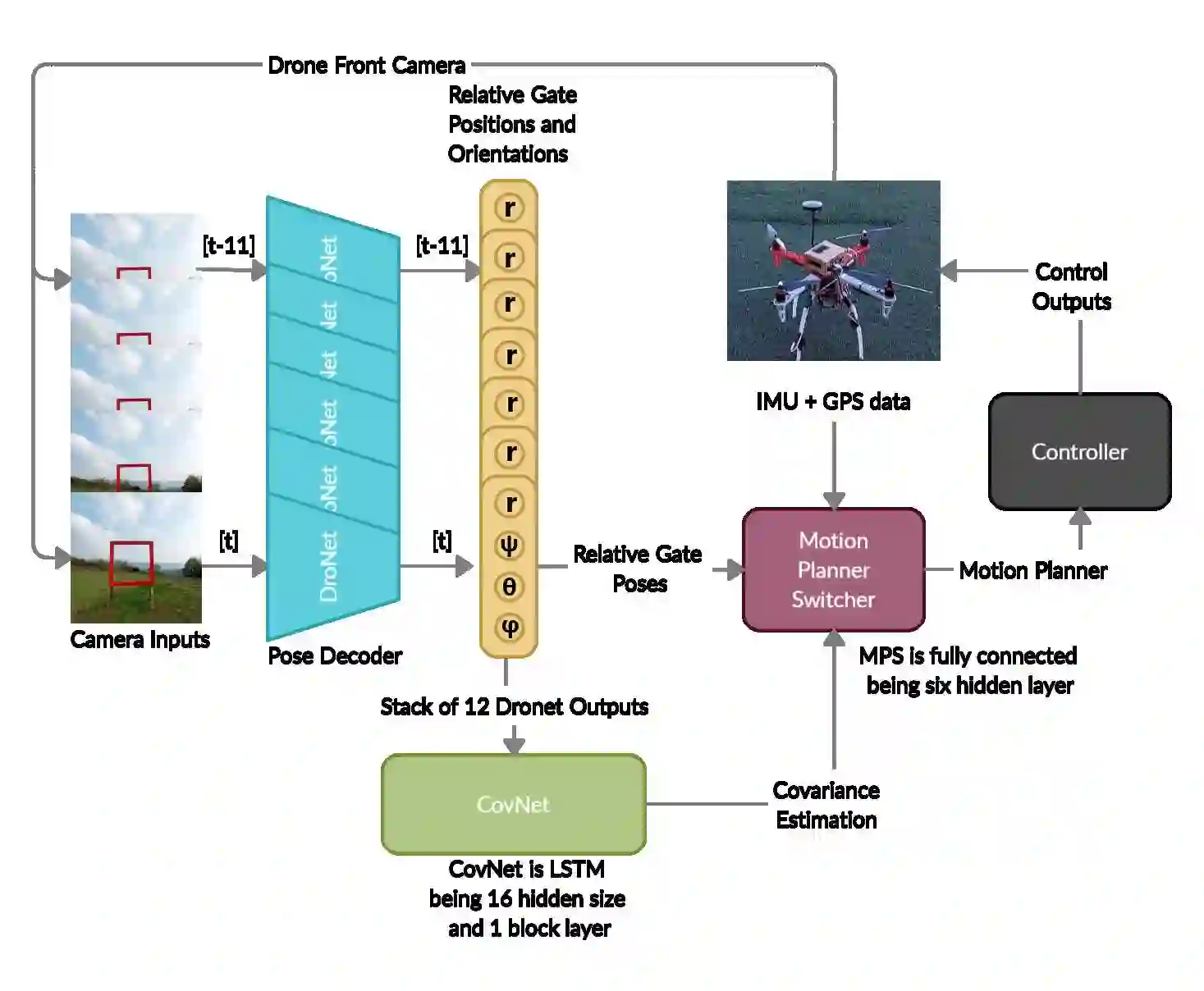
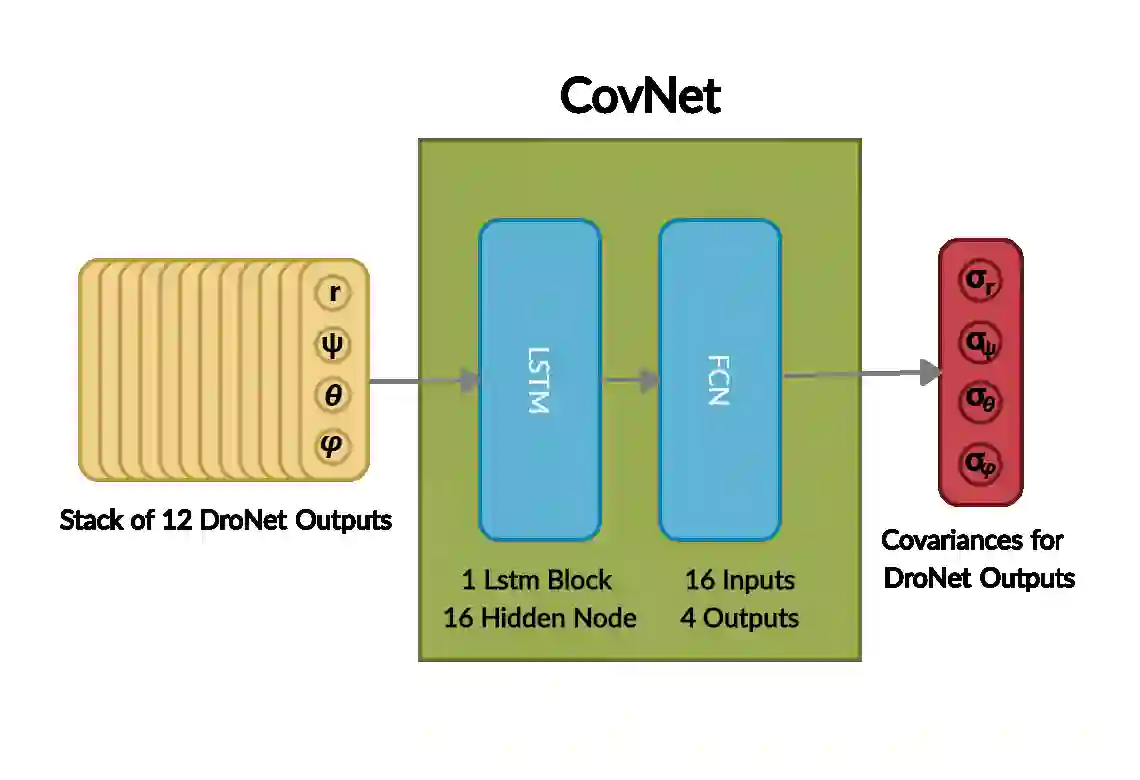
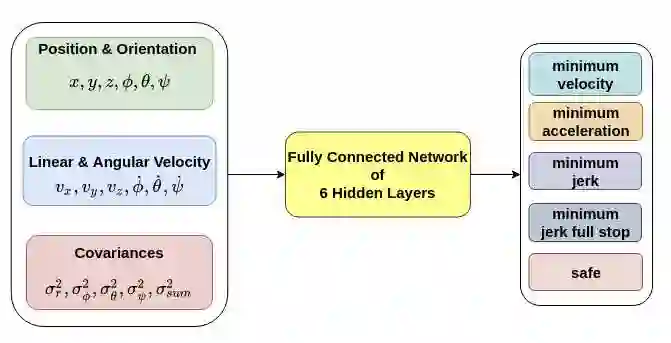
We investigate how to utilize predictive models for selecting appropriate motion planning strategies based on perception uncertainty estimation for agile unmanned aerial vehicle (UAV) navigation tasks. Although there are variety of motion planning and perception algorithms for such tasks, the impact of perception uncertainty is not explicitly handled in many of the current motion algorithms, which leads to performance loss in real-life scenarios where the measurement are often noisy due to external disturbances. We develop a novel framework for embedding perception uncertainty to high level motion planning management, in order to select the best available motion planning approach for the currently estimated perception uncertainty. We estimate the uncertainty in visual inputs using a deep neural network (CovNet) that explicitly predicts the covariance of the current measurements. Next, we train a high level machine learning model for predicting the lowest cost motion planning algorithm given the current estimate of covariance as well as the UAV states. We demonstrate on both real-life data and drone racing simulations that our approach, named uncertainty driven motion planning switcher (UDS) yields the safest and fastest trajectories among compared alternatives. Furthermore, we show that the developed approach learns how to trade-off safety with agility by switching to motion planners that leads to more agile trajectories when the estimated covariance is high and vice versa.
翻译:我们研究如何利用预测模型来选择基于对机动无人驾驶飞行器(无人驾驶飞行器)导航任务的认识不确定性估计的适当的运动规划战略。虽然对此类任务有各种各样的运动规划和感知算法,但目前许多运动算法并未明确处理感知不确定性的影响,这导致实际生活情景的性能损失,因为外部扰动经常造成测量的噪音。我们开发了一个新的框架,将感知不确定性纳入高水平的动规划管理,以便为目前估计的感知不确定性不确定性选择最佳的可用运动规划方法。我们利用一个明确预测当前测量的变异性的深神经网络(CovNet)估算视觉投入的不确定性。接下来,我们培训了一个高层次的机器学习模型,以预测最低成本运动规划算法,因为目前对共变异性的估计以及UAV州。我们用真实生命数据和无人机赛车模拟来证明我们的方法,称为不确定性驱动运动规划切换器(UDS)能够产生最安全和最快的轨迹。此外,我们展示了发达的方法如何在贸易常态上学会如何改变安全性动态,通过移动来更灵活。