厉害了!中国石油大学仿生无人机视觉导航研究取得新成果
中国石油大学机电工程学院讲师罗偲、信息与控制工程学院教授任鹏在仿生无人机视觉导航研究领域的最新成果《基于视觉辅助的仿生无人机着陆控制研究》(AVision-aided Approach to Perching a Bio-inspired Unmanned Aerial Vehicle)刊发在了《电气和电子工程师协会工业电子会刊》(IEEE Transactions on Industrial Electronics)。
该科研成果提出了一种通过仿生柔性设备辅助无人机视觉着陆的新方法。
相关研究得到国家自然科学基金、山东省自然科学基金及青岛市应用基础研究基金支持。
谁这么厉害?
论文第一作者及通讯作者为中国石油大学机电工程学院讲师罗偲,信息与控制工程学院硕士于雷健、教授任鹏为论文共同通讯作者,中国石油大学(华东)为论文独立完成单位。
我校石油工业训练中心为无人机组装及测试提供技术和场地支持。
为什么说这很厉害?
旋翼无人机越来越多地投入到远海油井执行任务,但其工作时所处的复杂环境给飞行安全带来巨大威胁,因此对其导航控制系统的要求也随之提高。根据针对无人机的飞行事故统计,无人机在起飞和着陆过程中最容易受地面障碍物、积水、结冰的影响,发生失稳、失控导致侧翻坠机,其中着陆期间的事故所占比重更大。
众所周知,飞行器对着陆场地面、着陆场保障条件及前期着陆准备要求较高,在实际应用中无人机依然需要借助前期修建的停机坪、着陆灯等地面辅助设施完成着陆。在紧急救援、远海检测和火灾爆炸发生地等需要无人机发挥作用的环境中,传统的导航、着陆与控制系统存在极大的限制。
提高旋翼无人机在非结构化地形下定点降落的成功率,将大幅度延长其在任务区域的待机时间、降低在抵近侦查时暴露的风险,以及提高各类救援勘察任务中的行动有效性。
怎么解决的?
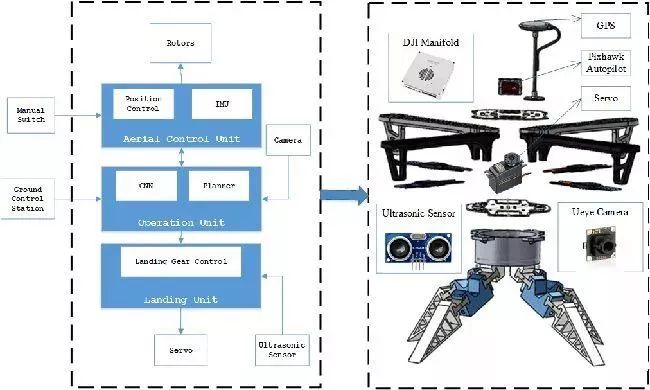
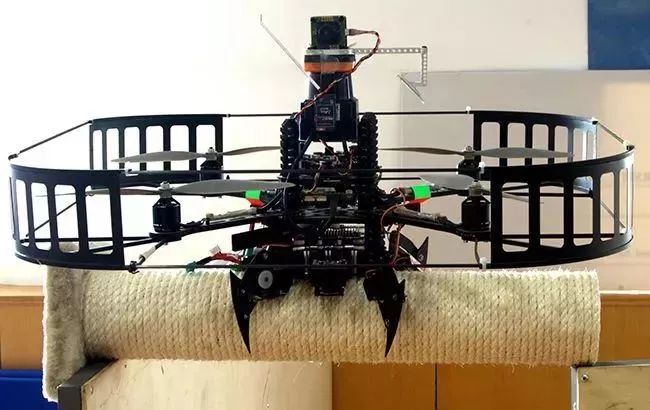
针对上述无人机着陆时的关键问题,机电工程学院同信息与控制工程学院跨学科研究团队通过微电子、计算机视觉、机械仿生学以及信号处理等学科交叉,以视觉环境感知建模技术为核心,通过理论模拟计算和实验测试相结合,设计针对非结构化地形下着陆的缓冲仿生夹持系统。该爪式着陆系统有别于传统的降落伞回收、空中回收、起落架滑轮着陆、拦截网回收和气垫着陆等无人机回收方法,使无人机能够在大坡度斜面、树枝、电线杆和横梁等非结构化地形下实现安全机降;利用基于神经网络的自适应控制,研究在强紊流、低高度情况下无人机稳定运动的控制算法,实现稳定、定点、安全着陆。
你说你不知道到底有多厉害?
IEEE Transactions on Industrial Electronics主编Makoto Iwasaki教授及匿名审稿人对该工作给予较高评价,认为基于视觉的仿生柔性着陆机构是无人机在非结构化地形下着陆的有效方式之一。该方法的提出推动了无人机着陆技术的发展(This article is a good article on the perching of UAV, and advancing the domain towards bio‐inspired UAV.)。文章体现出极高的复杂性和完整性(The complexity and completeness of the work accomplished is certain)。
IEEE Transactions on Industrial Electronics是电气电子领域国际顶级期刊,主要报道信息、控制、电气及工业电子等领域最新的研究进展,期刊影响因子7.168,属于SCI一区TOP期刊。
(转自无人机网)

长按识别图中二维码关注我们!






