【泡泡一分钟】基于几何约束的单目视觉里程计尺度恢复
每天一分钟,带你读遍机器人顶级会议文章
标题:Monocular Visual Odometry Scale Recovery using Geometrical Constraint
作者:Xiangwei Wang Hui Zhang Xiaochuan Yin Mingxiao Du and Qijun Chen
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

尺度恢复是单目视觉里程(VO)计的基本问题之一。摄像机高度通常用作恢复尺度的绝对参考。在这种情况下,尺度恢复的精度取决于道路区域检测和道路几何模型计算的准确性。在以前的工作中,道路检测和道路几何模型计算是依次地被解决:道路几何模型计算基于道路检测,道路区域检测基于颜色信息。但是,道路的颜色信息不够稳定。
在(我们)提出的方法中,将估计的道路几何模型作为反馈考虑进去,以检测道路区域。因此,道路区域检测和道路几何模型估计可以使相互受益。使用Delaunay三角剖分方法将输入图像分割为多个三角形,并将匹配的特征点作为顶点。通过比较三角区域的几何模型与道路的几何模型,以决定是否将将每个三角区域分类为道路区域,道路几何模型在线被更新。
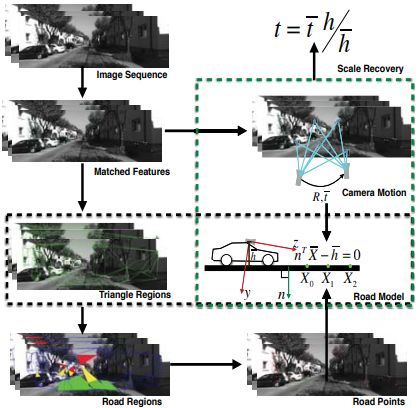
图1,本文提出的单目VO算法结构图。初始的VO过程计算初始的自运动(ego-motion)R和t¯(t¯不是绝对尺度)。道路俯仰角是道路几何模型的中心单元,它可以从自运动中被估计。使用Delaunay三角剖分方法将输入的图像帧分割成一组三角形,并通过将道路几何模型考虑进去来检查每个三角形是否属于道路区域。使用道路特征点来计算道路模型并利用相机高度信息来恢复尺度。
尺度恢复方法:
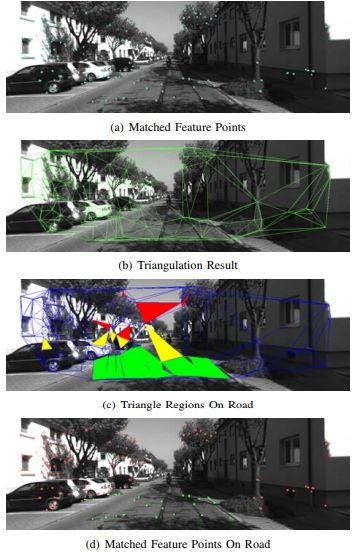
图2,道路区域检测结果。(a)图显示所有匹配的特征点;(b)用Delaunay三角剖分方法分割的图像帧,然后如图(c)所示,道路的三角区域被标记成绿色,如图(d)所示,道路特征点和其他的特征点被标记成绿色和红色。
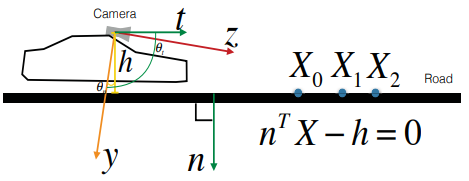
图3,如果车在水平面上行驶t的方向与道路的法线方向垂直。
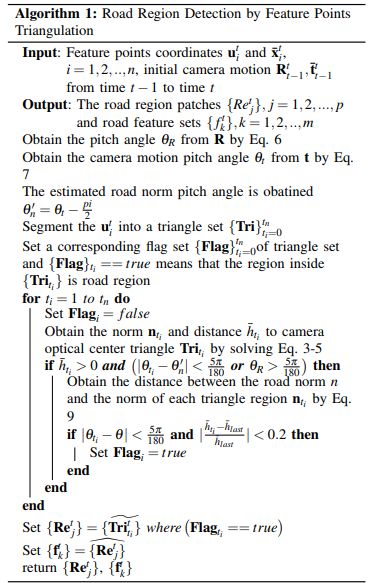
图4,基于特征点三角剖分的道路区域检测算法
我们在KITTI数据集上评估了我们的视觉里程计尺度恢复方法,结果表明我们的方法在所有现有的单目视觉里程计尺度恢复方法中实现了最佳性能,且无需额外的传感器。
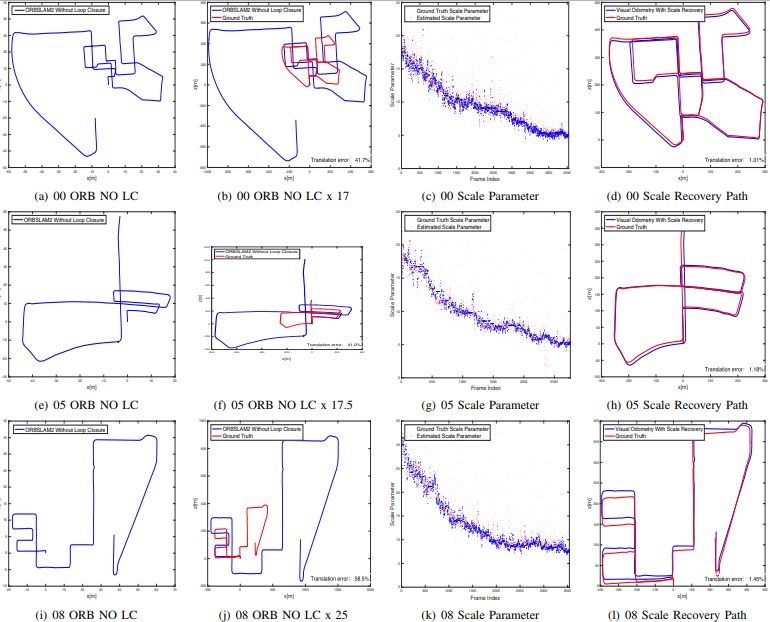
图5,在KITTI数据集的00,05,08序列上的尺度恢复性能比较。第一列是单目无闭环的ORB-SLAM2的结果;第二列是单目ORB-SLAM2分别乘以固定尺度参数17,17.5,25的结果;第三列是用我们提出的方法乘以它们的尺度参数结果。
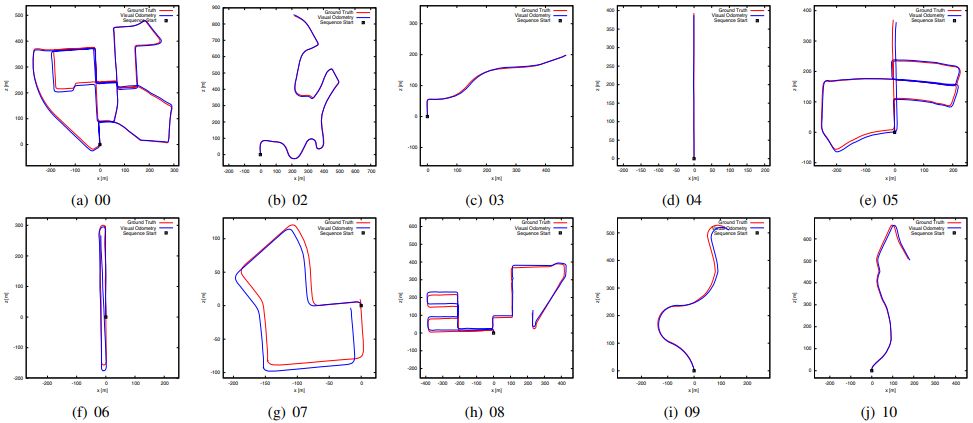
图6,在KITTI数据集的00,02~10序列上视觉里程计尺度恢复的结果。红线是真实轨迹,蓝线是我们的方法的轨迹,在02(图b)08(图h)09(图i)序列中,ORB-SLAM2在中途丢失了,因此它们对于的轨迹不完整。
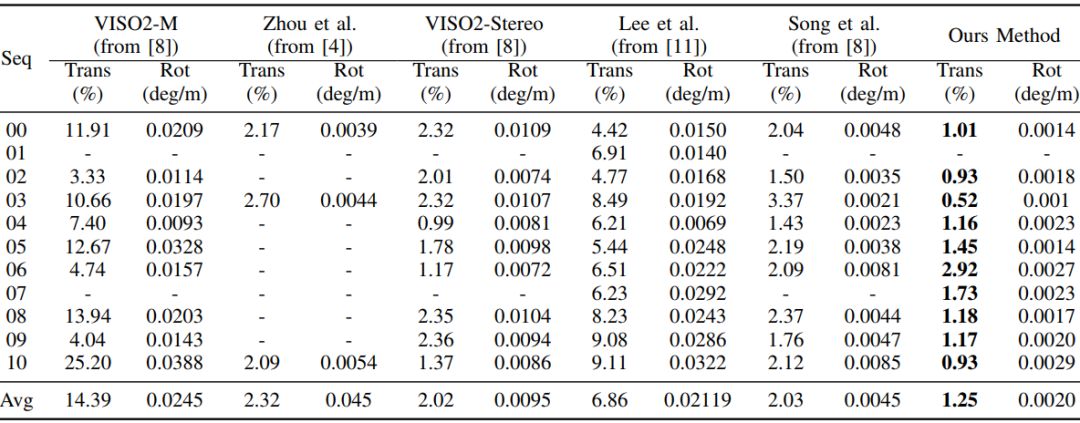
表1,我们的方法与KITTI数据集上的其它视觉里程计方法的在平移和旋转误差方面的比较。

Abstract
Scale recovery is one of the essential problems for monocular visual odometry. The camera height is usually used as an absolute reference to recover the scale. In this case, the precision of scale recovery depends on the accuracy of the road region detection and road geometrical model calculation. In previous works, road detection and road geometrical model calculation are solved sequentially: the road geometrical model calculation is based on the road detection and the road region detection is based on the color information. However, the color information of a road is not stable enough. In the proposed method, the estimated road geometrical model is taken into consideration to detect the road region as a feedback. Therefore, the road region detection and road geometrical model estimation can benefit each other. Delaunay Triangulation method is used to segment an input image to many triangles with the matched feature points as vertices. Every triangle region is classified as a road region or not by comparing their geometrical model with that of the road and the road geometrical model is updated online. We evaluate our visual odometry scale recovery method on the KITTI dataset and the results show that our method is achieving the best performance among all existing monocular visual odometry scale recovery methods without additional sensors.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




