
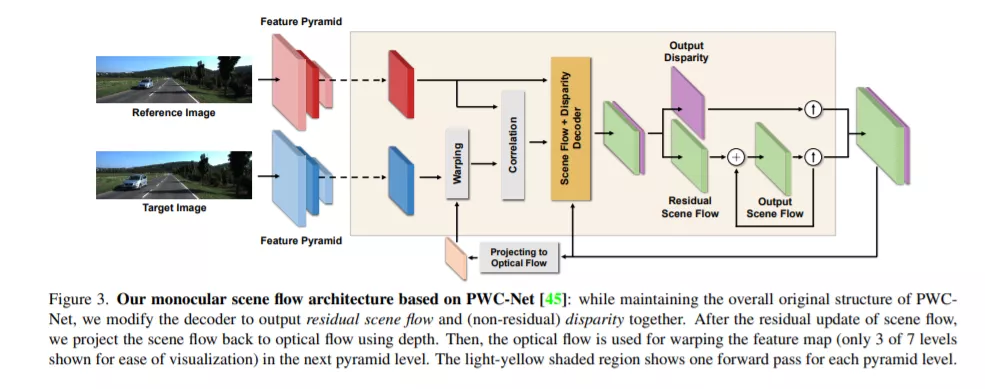
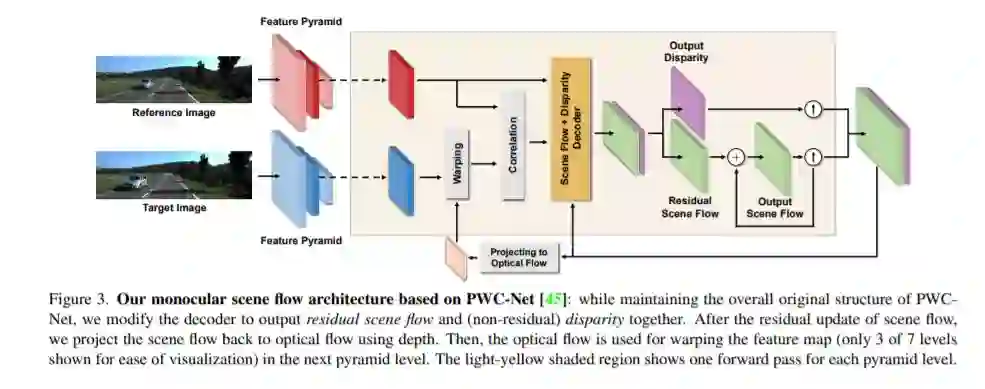
场景流估计在三维环境感知中越来越受到重视。单目场景流估计是一个高度不适定的问题,目前缺乏实用的解决方案。单目场景流估计是从两个时间上连续的图像中获取三维结构和三维运动。我们提出了一种新的单目场景流算法,该算法具有较强的精度和实时性。采用逆问题观点,我们设计了一个单独的卷积神经网络(CNN),它可以成功地从一个经典的光流成本体积同时估计深度和三维运动。我们采用带有三维损失函数和遮挡推理的自监督学习来利用未标记的数据。我们验证了我们的设计选择,包括代理丢失和增加设置。我们的模型在单目场景流的无监督/自监督学习方法中达到了最先进的精度,并在光流和单目深度估计子任务中获得了具有竞争力的结果。半监督微调进一步提高了精度,并在实时产生有希望的结果。
成为VIP会员查看完整内容
相关内容

CVPR is the premier annual computer vision event comprising the main conference and several co-located workshops and short courses. With its high quality and low cost, it provides an exceptional value for students, academics and industry researchers.
CVPR 2020 will take place at The Washington State Convention Center in Seattle, WA, from June 16 to June 20, 2020.
http://cvpr2020.thecvf.com/

相关VIP内容
相关资讯
相关论文