![]() 作者| 陈大鑫
ACCV (Asian Conference on Cpmputer Vision)是仅次于CVPR、ICCV、ECCV 的计算机视觉领域会议(与BMVC类似),影响力逐年上升,今年的ACCV 2020 原计划在日本京都于11月30-12月4日召开,现因疫情原因改为线上。
ACCV 2020 共录用论文 255 篇,官方提供所有论文开放下载。
官网链接:http://accv2020.kyoto/
截止目前,大会已经公布了最佳论文奖、最佳学生论文奖、最佳应用论文奖等三项大奖,其中帝国理工和华为诺亚方舟合作获得了最佳学生论文奖。
以下AI科技评论就带大家让我们一起来看看这三项大奖吧 !
作者| 陈大鑫
ACCV (Asian Conference on Cpmputer Vision)是仅次于CVPR、ICCV、ECCV 的计算机视觉领域会议(与BMVC类似),影响力逐年上升,今年的ACCV 2020 原计划在日本京都于11月30-12月4日召开,现因疫情原因改为线上。
ACCV 2020 共录用论文 255 篇,官方提供所有论文开放下载。
官网链接:http://accv2020.kyoto/
截止目前,大会已经公布了最佳论文奖、最佳学生论文奖、最佳应用论文奖等三项大奖,其中帝国理工和华为诺亚方舟合作获得了最佳学生论文奖。
以下AI科技评论就带大家让我们一起来看看这三项大奖吧 !
最佳论文奖
![]()
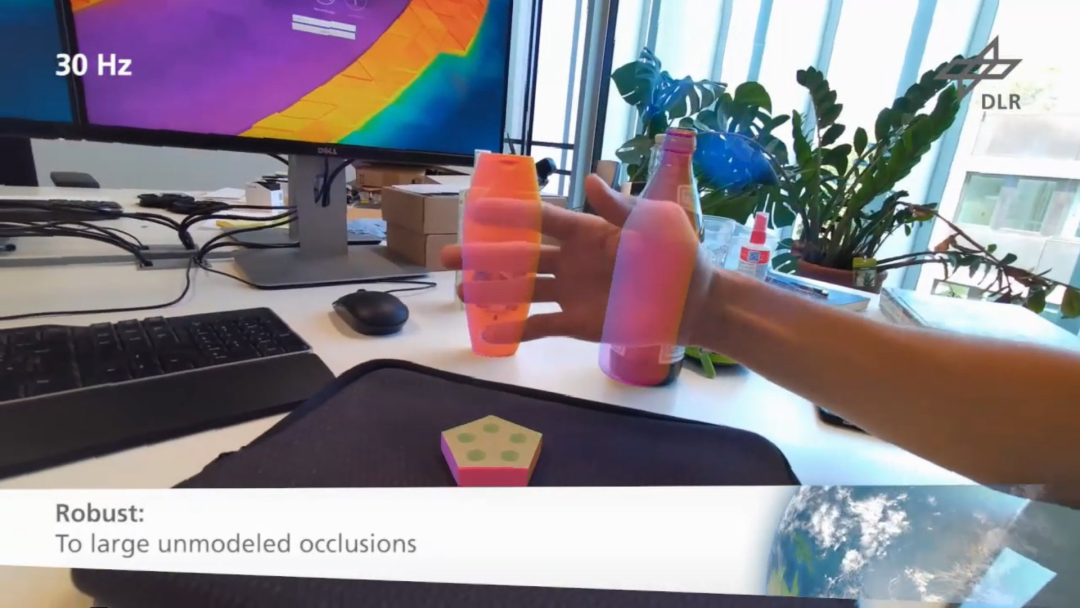
获奖论文:《A sparse gaussian apppproach to region-based 6DoF Object Tracking》
论文作者:Manuel Stoiber、Martin Pfanne、Klaus H. Strobl、Rudolph Triebel、Alin Albu-Schaffer 。
https://openaccess.thecvf.com/content/ACCV2020/papers/Stoiber_A_Sparse_Gaussian_Approach_to_Region-Based_6DoF_Object_Tracking_ACCV_2020_paper.pdf
开源代码:https://github.com/DLR-RM/RBGT
本文提出了一种新颖、高效的稀疏方法,用于基于区域的6DoF目标跟踪,该方法仅需要单目RGB相机和3D物体模型。
本文工作的主要贡献是一个概率模型,该模型沿对应线稀疏地考虑了图像信息。
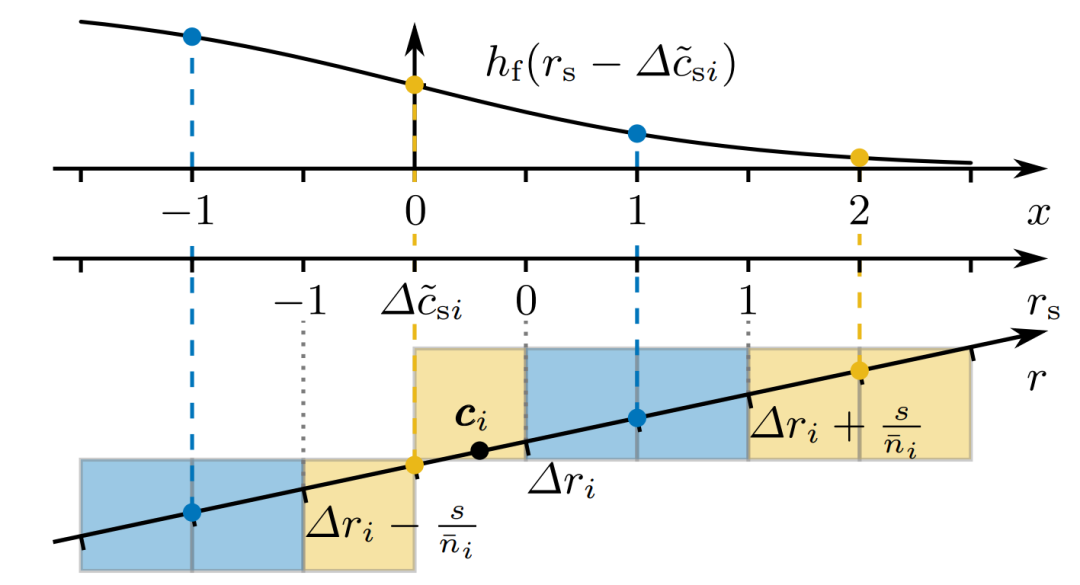
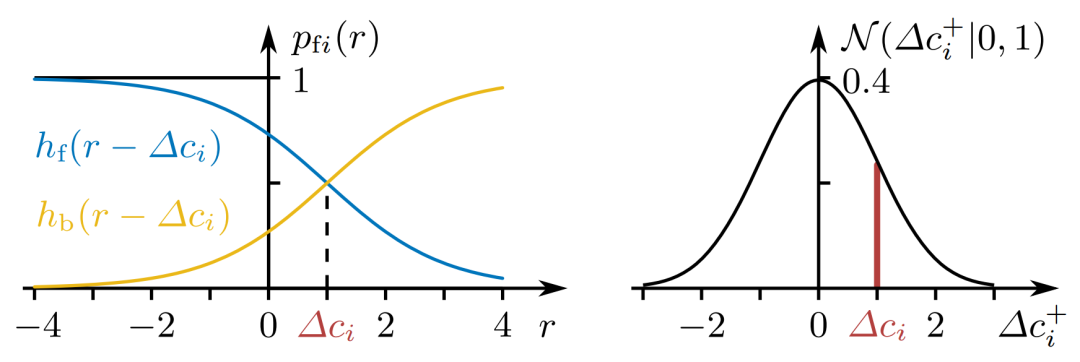
![]() 对于实现,本文提供了高效的离散比例空间公式。此外,本文得出了一个新颖的数学证明,表明提出的似然函数遵循高斯分布。
基于此信息,本文为正则化牛顿优化中使用的对数似然导数开发了鲁棒近似。
对于实现,本文提供了高效的离散比例空间公式。此外,本文得出了一个新颖的数学证明,表明提出的似然函数遵循高斯分布。
基于此信息,本文为正则化牛顿优化中使用的对数似然导数开发了鲁棒近似。
![]() 在多个实验中,作者表明,在跟踪成功方面,本文的方法优于基于区域的SOTA模型,且速度还要快上一个数量级。
获奖论文:《Pre-training without Natural Images》
作者:Hirokatsu Kataoka, Kazushige Okayasu, Asato Matsumoto,Eisuke Yamagata,Ryosuke Yamada, Nakamasa Inoue,Akio Nakamura,and Yutaka Satoh
研究单位:日本国家先进工业研究院、东京电机大学、筑波大学、东京理工学院
论文链接:https://openaccess.thecvf.com/content/ACCV2020/html/Kataoka_Pre-training_without_Natural_Images_ACCV_2020_paper.html
开源地址:https://github.com/hirokatsukataoka16/FractalDB
在多个实验中,作者表明,在跟踪成功方面,本文的方法优于基于区域的SOTA模型,且速度还要快上一个数量级。
获奖论文:《Pre-training without Natural Images》
作者:Hirokatsu Kataoka, Kazushige Okayasu, Asato Matsumoto,Eisuke Yamagata,Ryosuke Yamada, Nakamasa Inoue,Akio Nakamura,and Yutaka Satoh
研究单位:日本国家先进工业研究院、东京电机大学、筑波大学、东京理工学院
论文链接:https://openaccess.thecvf.com/content/ACCV2020/html/Kataoka_Pre-training_without_Natural_Images_ACCV_2020_paper.html
开源地址:https://github.com/hirokatsukataoka16/FractalDB
最佳学生论文奖
获奖论文:《Project to Adapt: Domain Adaptation for Depth Completion from Noisy and Sparse Sensor Data》
论文作者:Adrian Lopez-Rodriguez、Benjamin Busam、 Krystian Mikolajczyk
研究单位:帝国理工学院、华为诺亚方舟实验室、慕尼黑工业大学
论文链接:
https://openaccess.thecvf.com/content/ACCV2020/papers/Lopez-Rodriguez_Project_to_Adapt_Domain_Adaptation_for_Depth_Completion_from_Noisy_ACCV_2020_paper.pdf
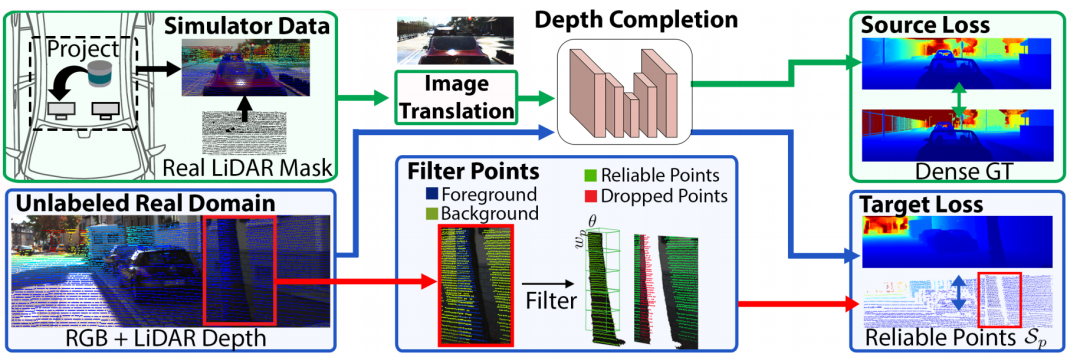
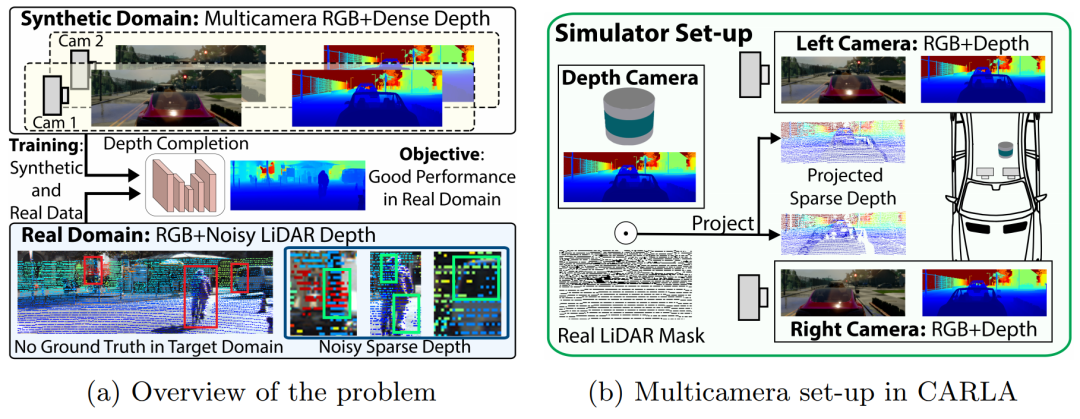
深度完成(Depth completion)的目的是根据稀疏的深度输入预测密集的深度图。获取用于深度完成设置的密集ground truth 注释可能很困难,于此同时,实际LiDAR测量值与合成数据之间的显着领域差距也阻止了在虚拟设置中成功训练模型。
![]() 我们提出了一种针对稀疏到稠密深度完成的领域适应方法,该方法是根据合成数据进行训练的,而无需在实际域中进行注释或使用其他传感器。
如上图所示,我们的方法模拟了RGB + LiDAR设置中的真实传感器噪声,并包括三个模块:通过投影模拟合成域中的真实LiDAR输入、过滤真实噪声的LiDAR以进行监控以及使用CycleGAN调整合成RGB图像方法。我们根据KITTI深度完成基准中的SOTA技术对这些模块进行了广泛评估,评估结果显示出我们方法得到了明显的改进。
论文链接:
https://openaccess.thecvf.com/content/ACCV2020/html/Navasardyan_Image_Inpainting_with_Onion_Convolutions_ACCV_2020_paper.html
我们提出了一种针对稀疏到稠密深度完成的领域适应方法,该方法是根据合成数据进行训练的,而无需在实际域中进行注释或使用其他传感器。
如上图所示,我们的方法模拟了RGB + LiDAR设置中的真实传感器噪声,并包括三个模块:通过投影模拟合成域中的真实LiDAR输入、过滤真实噪声的LiDAR以进行监控以及使用CycleGAN调整合成RGB图像方法。我们根据KITTI深度完成基准中的SOTA技术对这些模块进行了广泛评估,评估结果显示出我们方法得到了明显的改进。
论文链接:
https://openaccess.thecvf.com/content/ACCV2020/html/Navasardyan_Image_Inpainting_with_Onion_Convolutions_ACCV_2020_paper.html
最佳应用论文奖
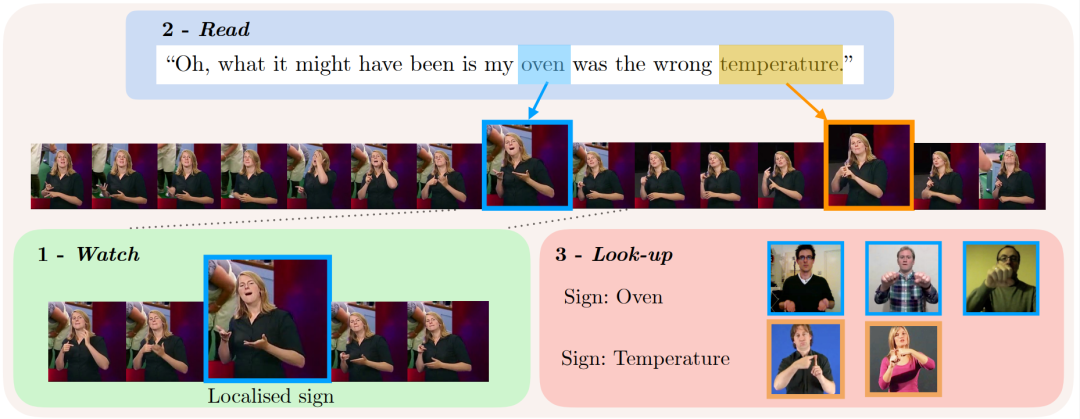
获奖论文:《Watch,read and lookup:learning to spot signs from multiple supervisors》
论文链接:
https://openaccess.thecvf.com/content/ACCV2020/html/Momeni_Watch_read_and_lookup_learning_to_spot_signs_from_multiple_ACCV_2020_paper.html
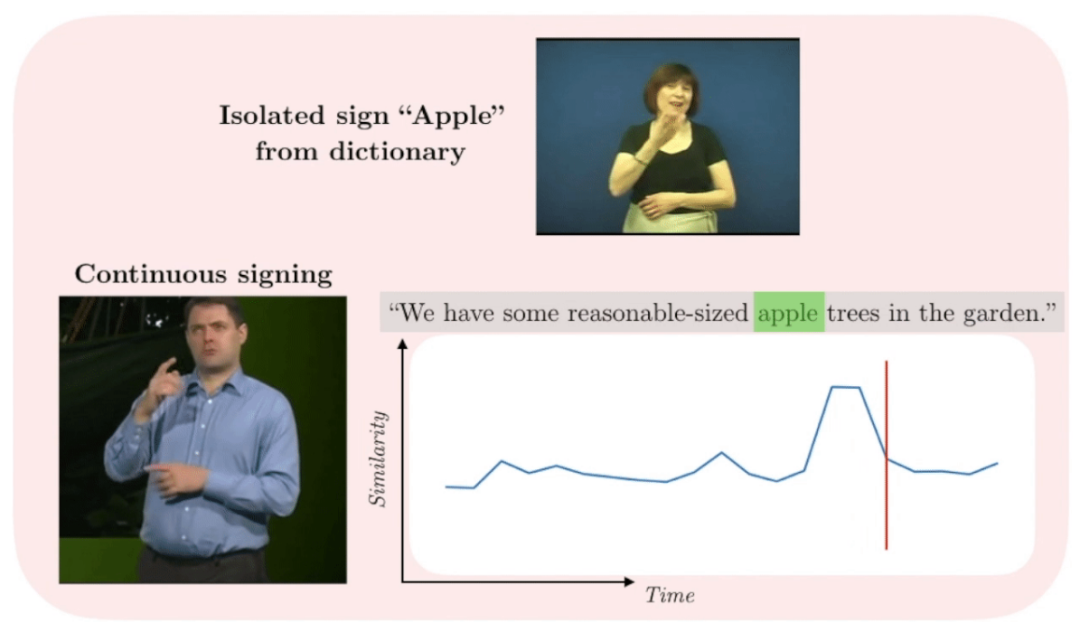
本文工作的重点是标识识别:给出一个孤立标识的视频,我们的任务是确定是否在连续的,共同表达的手语视频中对它进行了标记。
为了实现此标识发现任务,我们通过以下几种类型的可用监督来训练模型:
(2)阅读提供附加弱监督的相关字幕(标记内容的现有翻译);
(3)在视觉手语词典中查找单词(没有可用的共同标注的示例),以实现新颖的手势识别。
使用噪声对比估计和多实例学习的原理将这三个任务集成到一个统一的学习框架中:
我们在 low-shot sign spotting基准上验证了我们方法的有效性。此外,我们提供了隔离符号的机器可读的英国手语(BSL)词典数据集BslDict,以促进对该任务的研究。
数据集,模型和代码可在我们的项目页面上获得:https://www.robots.ox.ac.uk/~vgg/research/bsldict/
https://openaccess.thecvf.com/content/ACCV2020/html/Li_A_cost-effective_method_for_improving_and_re-purposing_large_pre-trained_GANs_ACCV_2020_paper.html
论文作者:Qi Li , Long Mai , Michael A. Alcorn, and Anh Nguyen
![]()
![]()
点击“阅读原文”,进入直播间预约,避免错过精彩分享!
 作者| 陈大鑫
作者| 陈大鑫

 对于实现,本文提供了高效的离散比例空间公式。此外,本文得出了一个新颖的数学证明,表明提出的似然函数遵循高斯分布。
对于实现,本文提供了高效的离散比例空间公式。此外,本文得出了一个新颖的数学证明,表明提出的似然函数遵循高斯分布。
 我们提出了一种针对稀疏到稠密深度完成的领域适应方法,该方法是根据合成数据进行训练的,而无需在实际域中进行注释或使用其他传感器。
我们提出了一种针对稀疏到稠密深度完成的领域适应方法,该方法是根据合成数据进行训练的,而无需在实际域中进行注释或使用其他传感器。