【泡泡一分钟】Mapillary Vistas数据集用于街景语义理解(ICCV2017-524)
每天一分钟,带你读遍机器人顶级会议文章
标题:The Mapillary Vistas Dataset for Semantic Understanding of Street Scenes
作者:Gerhard Neuhold, Tobias Ollmann, Samuel Rota Bulo`, Peter Kontschieder
来源:International Conference on Computer Vision (ICCV 2017)
编译:刘梦雅
审核:陈世浪,颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

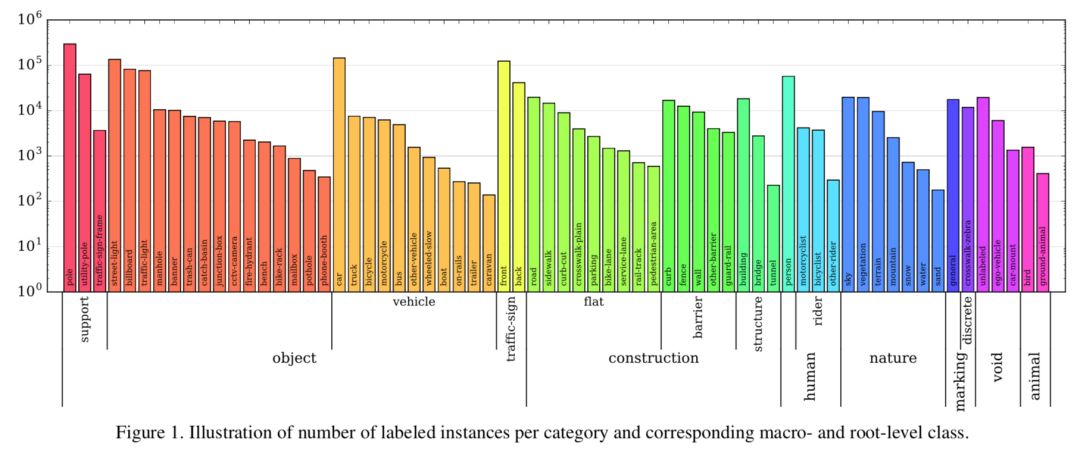
Mapillary Vistas数据集是一个新建立的,大场景的街景数据集,包括25000张高分辨率的彩色图像,分成66个类,其中有37个类别是特定的附加于实例的标签。对物体的标签注释可以使用多边形进行稠密,精细的描绘。我们的数据集比Cityscapes的精细注释总量大5倍,并包含来自世界各地在各种条件下捕获的图像,包括不同天气,季节和时间的图像。图像由经验丰富的摄影师利用不同的成像设备(手机,平板电脑,运动相机,专业捕捉装备)进行拍摄捕捉。通过这种方式,我们的数据集涵盖了多样性,丰富的细节以及地理信息。为了使数据集能作为一个基准进行各种任务,我们定义语义图像分割以及实例图像分割,旨在进一步开发用于视觉道路场景理解的先进算法。下图就是本文对图像进行分类的标签,包括大类以及在大类中分的小类。

Abstract
The Mapillary Vistas Dataset is a novel, large-scale street-level image dataset containing 25000 high-resolution images annotated into 66 object categories with additional, instance-specific labels for 37 classes. Annotation is performed in a dense and fine-grained style by using polygons for delineating individual objects. Our dataset is 5× larger than the total amount of fine annotations for Cityscapes and contains images from all around the world, captured at various conditions regarding weather, season and daytime. Images come from different imaging devices (mobile phones, tablets, action cameras, professional cap- turing rigs) and differently experienced photographers. In such a way, our dataset has been designed and compiled to cover diversity, richness of detail and geographic extent. As default benchmark tasks, we define semantic image seg- mentation and instance-specific image segmentation, aim- ing to significantly further the development of state-of-the-art methods for visual road-scene understanding.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com