波士顿动力机器人跑酷揭秘!不用动捕和特效,凭借感知和适应技能完成动作

来源:量子位
本文约658字,建议阅读2分钟
本文
介绍
了9月1日 19:30~20:30举办的沈志强博士主题分享,欢迎扫码观看直播。

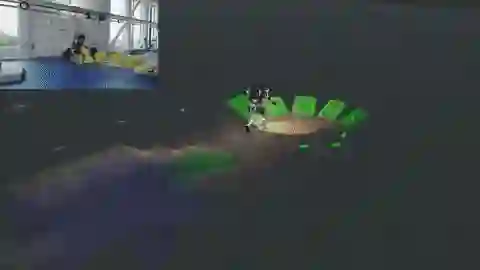
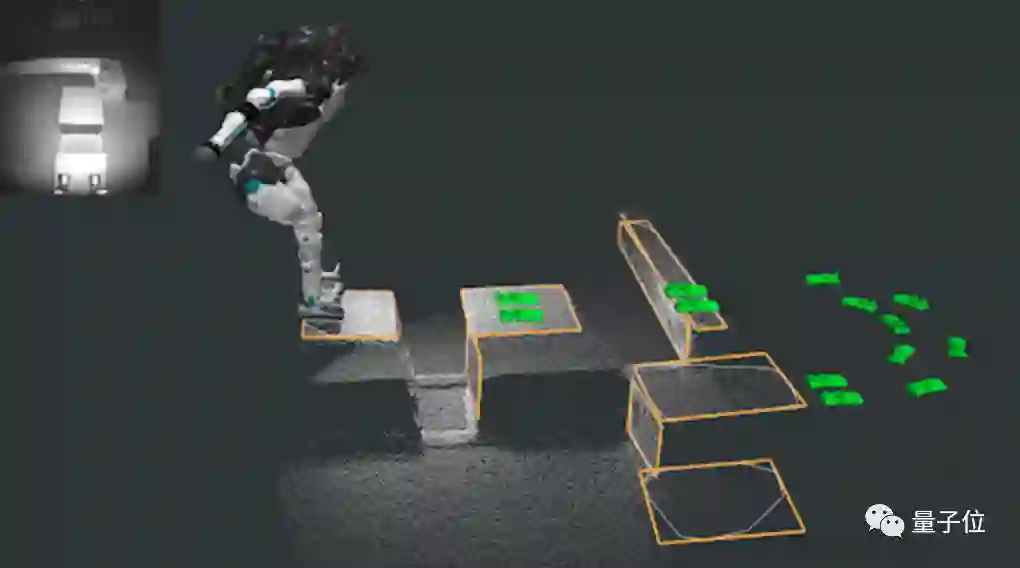
机器人眼中的跑酷世界
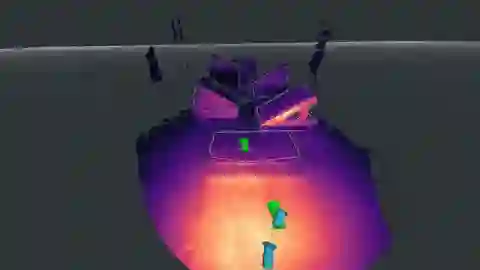
“看”不到远处的障碍物

预设动作,但无须预设细节



[1]https://blog.bostondynamics.com/flipping-the-script-with-atlas
[2]https://www.youtube.com/watch?v=EezdinoG4mk

登录查看更多
相关内容

专知会员服务
104+阅读 · 2019年10月22日
Arxiv
0+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月18日





相关VIP内容
专知会员服务
104+阅读 · 2019年10月22日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月18日