
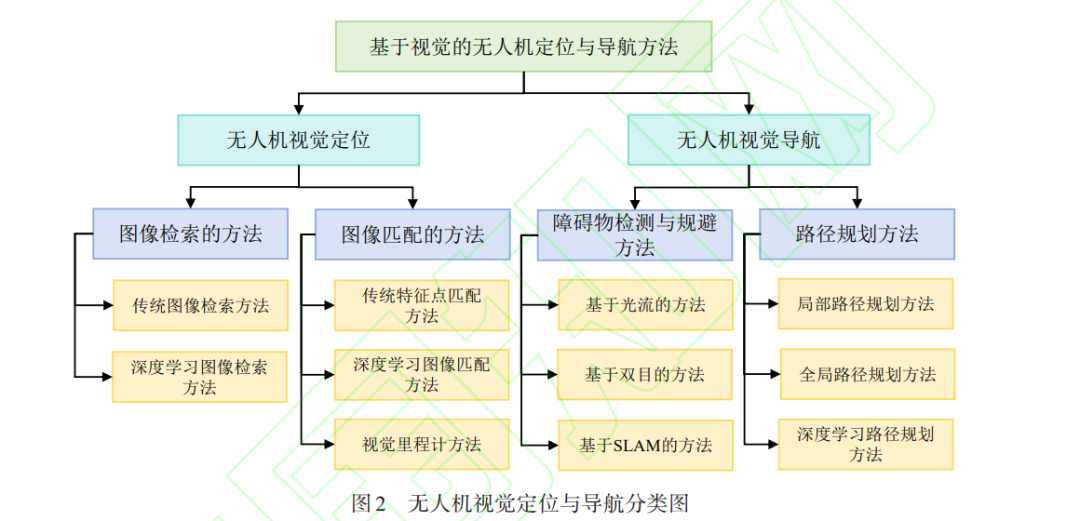
随着无人机(Unmanned Aerial Vehicle,UAV)成本的降低,无人机引起了越来越多的研究兴趣.其应用领域广泛,包括农业、消防、测绘、航拍以及娱乐应用.这些应用需要无人机在精准的自我定位下进行自主飞行,通常高度依赖于全球导航卫星系统(Global Navigation Satellite System,GNSS).然而,GNSS在长距离无线电通信方面存在多种缺陷(如非视距接收、多路径效应、欺骗信号),这推动了补充或取代卫星导航新方法的发展.基于视觉的无人机定位与导航方法利用无人机搭载的视觉传感器,实现自主定位与导航,成为解决这一问题的重要途径.本文的贡献在于系统性地梳理了基于视觉的无人机定位与导航技术,全面总结了该领域的研究现状和发展趋势.首先,介绍了无人机视觉定位的方法,主要分为图像检索和图像匹配两类,并对其技术特点、适用场景以及相关数据集和评价指标进行了分析.其次,详细阐述了无人机视觉导航的方法,根据导航功能的不同分为障碍物检测与规避方法以及路径规划方法,揭示了现有技术的优势和局限.最后,进一步讨论了基于视觉的无人机定位与导航方法在公共可用数据集、硬件加速、环境复杂性、实时性要求、能源限制以及模拟器到真实世界的泛化等方面可能面临的挑战.
成为VIP会员查看完整内容
相关内容
Arxiv
210+阅读 · 2023年4月7日
Arxiv
10+阅读 · 2018年3月20日
相关VIP内容
相关资讯
相关论文
Arxiv
210+阅读 · 2023年4月7日
Arxiv
10+阅读 · 2018年3月20日