帮林志颖修脸的3D重建,用两块A100加二维CNN就可以实现!
新智元报道
新智元报道
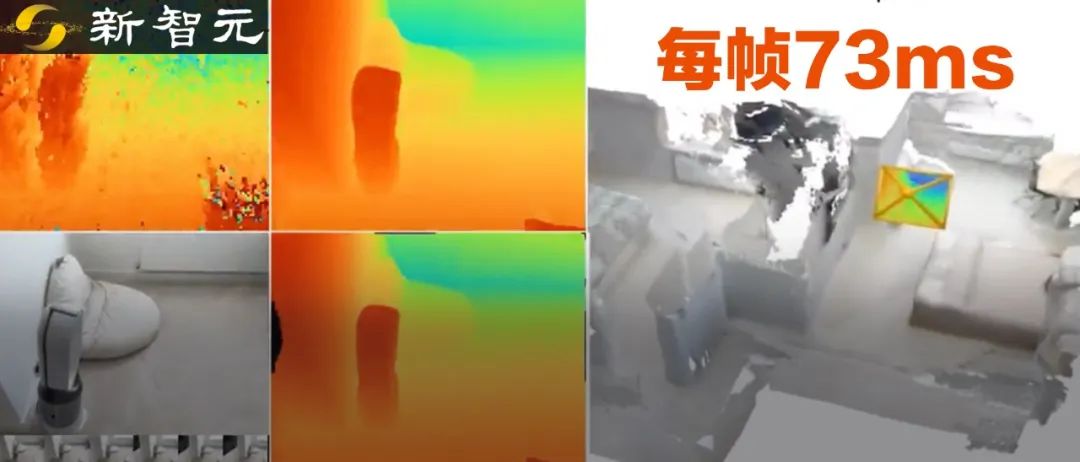
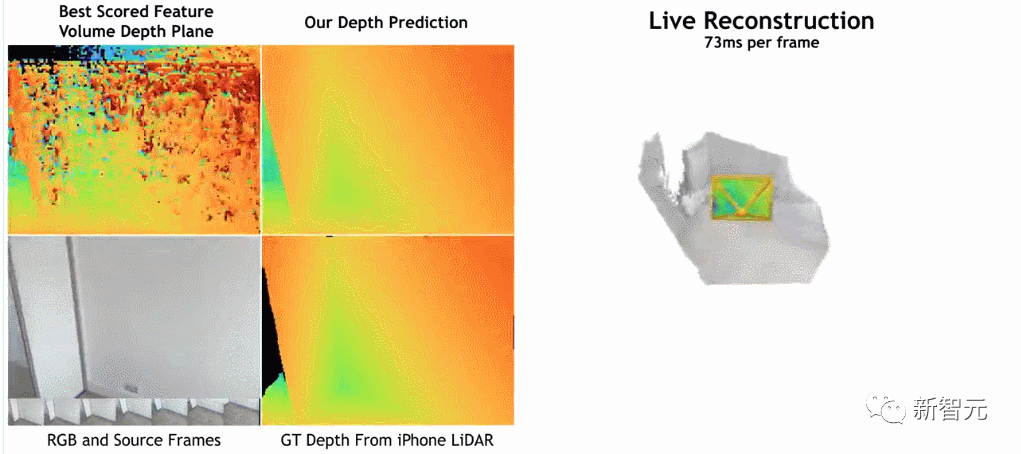
【新智元导读】不用三维构图的三维重建,速度能到每帧73ms。
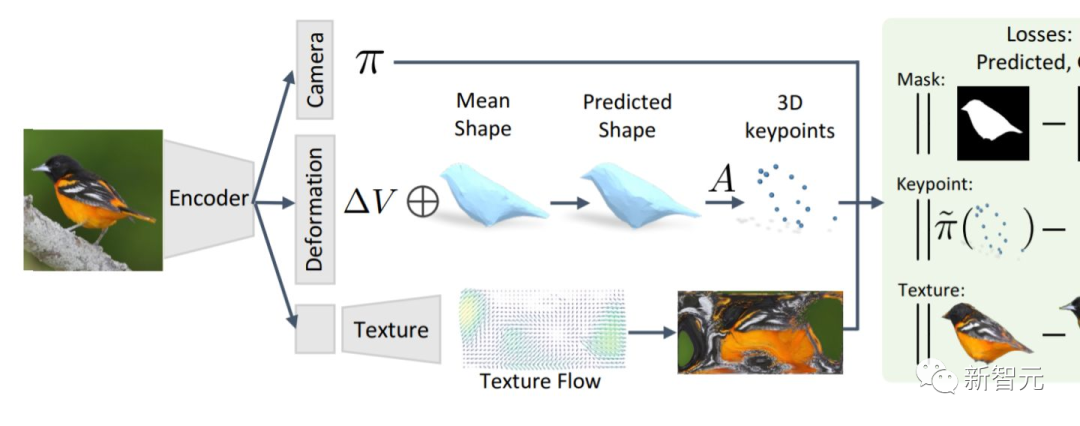

三维重建的不同技术路线,有望融合
不用3D卷积层,也能3D重建

登录查看更多
相关内容
Arxiv
0+阅读 · 2022年11月25日
Arxiv
12+阅读 · 2021年12月28日
Arxiv
12+阅读 · 2021年5月30日


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年11月25日
Arxiv
12+阅读 · 2021年12月28日
Arxiv
12+阅读 · 2021年5月30日