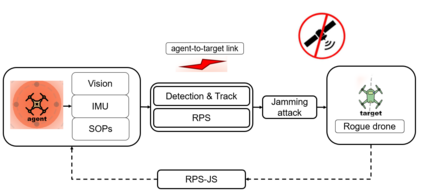
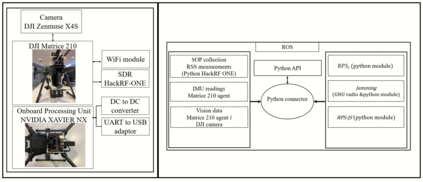
As the number of unauthorized operations of Unmanned Aerial Vehicles (UAVs) is rising, the implementation of a versatile counter-drone system is becoming a necessity. In this work, we develop a drone-based counter-drone system, that employs algorithms for detecting and tracking a rogue drone, in conjunction with wireless interception capabilities to jointly jam the rogue drone while achieving self positioning for the pursuer drone. In the proposed system a software-defined-radio (SDR) is used for switching between jamming transmissions and spectrum sweeping functionalities to achieve the desired GPS disruption and self-localization, respectively. Extensive field experiments demonstrate the effectiveness of the proposed solution in a realworld environment under various parameter settings.
翻译:随着无人驾驶航空飞行器(无人驾驶飞行器)未经授权操作的数量不断增加,实施多功能反钻探系统已成为一项必要工作。在这项工作中,我们开发了一个基于无人机的反钻探系统,使用算法探测和跟踪无赖无人驾驶飞机,同时利用无线拦截能力联合拦截无机无人驾驶飞机,同时实现追击无人驾驶飞机的自我定位。在拟议的系统中,一个软件定义的无线电系统(SDR)分别用于干扰传输和频谱扫瞄功能之间的转换,以实现所需的全球定位系统干扰和自我定位。广泛的实地实验表明,在不同参数设置下,拟议解决方案在现实环境中的有效性。