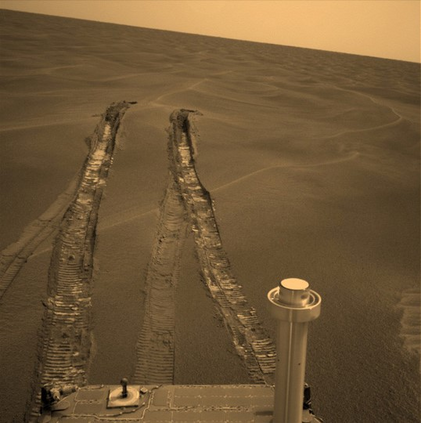
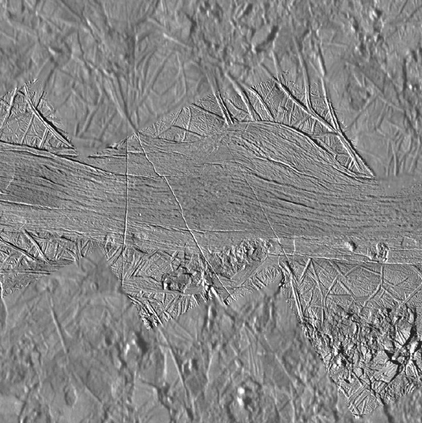
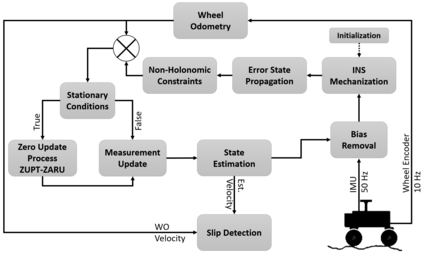
Slip detection is of fundamental importance for the safety and efficiency of rovers driving on the surface of extraterrestrial bodies. Current planetary rover slip detection systems rely on visual perception on the assumption that sufficient visual features can be acquired in the environment. However, visual-based methods are prone to suffer in perceptually degraded planetary environments with dominant low terrain features such as regolith, glacial terrain, salt-evaporites, and poor lighting conditions such as dark caves and permanently shadowed regions. Relying only on visual sensors for slip detection also requires additional computational power and reduces the rover traversal rate. This paper answers the question of how to detect wheel slippage of a planetary rover without depending on visual perception. In this respect, we propose a slip detection system that obtains its information from a proprioceptive localization framework that is capable of providing reliable, continuous, and computationally efficient state estimation over hundreds of meters. This is accomplished by using zero velocity update, zero angular rate update, and non-holonomic constraints as pseudo-measurement updates on an inertial navigation system framework. The proposed method is evaluated on actual hardware and field-tested in a planetary-analog environment. The method achieves greater than 92% slip detection accuracy for distances around 150 m using only an IMU and wheel encoders.
翻译:悬浮探测对于在地表外物体表面驾驶的流星体的安全和效率至关重要。目前的行星漫游探测器探测系统依赖于视觉认识,其假设是可以在环境中获得足够的视觉特征。然而,视觉方法很容易在感知性退化的行星环境中受到影响,其地势低的地形特征主要为摄氏、冰川地形、盐蒸发岩,以及黑暗洞穴和永久阴影区域等低光度条件。仅依靠视像传感器来探测滑动,还需要增加计算能力,降低越轨率。本文回答了如何在不依赖视觉认知的情况下探测行星环流轮滑坡的问题。在这方面,我们提议了一个滑动探测系统,从一个能提供可靠、连续和计算效率高的数百米地方定位框架获得信息。通过使用零速度更新、零角率更新和非血压限制作为对惯性轨道导航系统进行伪测量的更新来完成这项工作。在惯性导航系统上,仅采用比惯性定位定位定位系统更精确度和定位系统更精确度框架150度的实地评估方法。