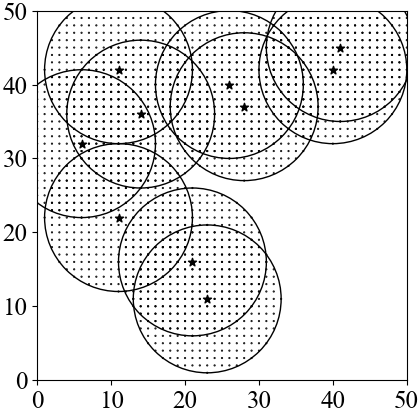
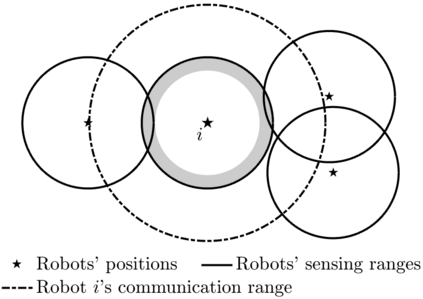
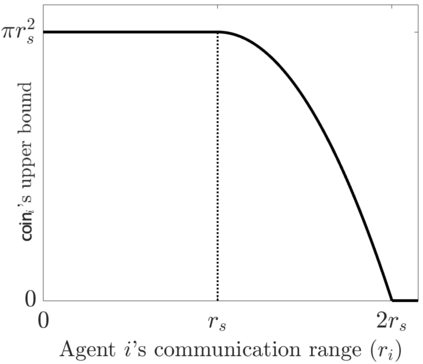
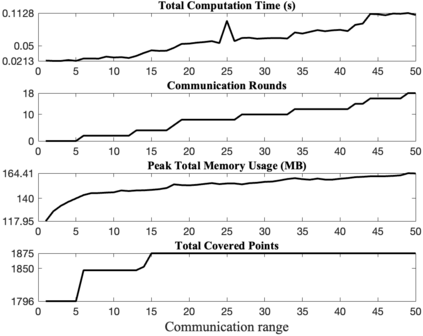
We introduce the first algorithm for distributed decision-making that provably balances the trade-off of centralization, for global near-optimality, vs. decentralization, for near-minimal on-board computation, communication, and memory resources. We are motivated by the future of autonomy that involves heterogeneous robots collaborating in complex~tasks, such as image covering, target tracking, and area monitoring. Current algorithms, such as consensus algorithms, are insufficient to fulfill this future: they achieve distributed communication only, at the expense of high communication, computation, and memory overloads. A shift to resource-aware algorithms is needed, that can account for each robot's on-board resources, independently. We provide the first resource-aware algorithm, Resource-Aware distributed Greedy (RAG). We focus on maximization problems involving monotone and "doubly" submodular functions, a diminishing returns property. RAG has near-minimal on-board resource requirements. Each agent can afford to run the algorithm by adjusting the size of its neighborhood, even if that means selecting actions in complete isolation. RAG has provable approximation performance, where each agent can independently determine its contribution. All in all, RAG is the first algorithm to quantify the trade-off of centralization, for global near-optimality, vs. decentralization, for near-minimal on-board resource requirements. To capture the trade-off, we introduce the notion of Centralization Of Information among non-Neighbors (COIN). We validate RAG in simulated scenarios of image covering with mobile robots.
翻译:我们引入了分配决策的第一种算法,这种算法能够平衡中央化的权衡、全球接近最佳的计算、通信和记忆资源。我们的动机是未来自治,它涉及在复杂任务中合作的多种机器人,例如图像覆盖、目标跟踪和地区监测。目前的算法,例如协商一致算法,不足以实现这一未来:它们只能实现分配通信,而牺牲高通信、计算和记忆超载。需要转向资源智能算法,这可以独立地计算每个机器人的机载资源。我们提供了第一个资源认知算法,即资源-软件分布的Greedy(RAG)。我们侧重于单调和“粗化”亚调功能的最大化问题。RAG拥有几乎最小化的机载资源要求。我们每个代理商都能够通过调整其社区规模来进行算法的调整,即使选择完全孤立的行动,也可以独立地计算每家机器人在机体上的资源-AG的准确度。