
这项研究的目的是调查和开发适合设计和分析低可观测无人作战飞行器(UCAV)的概念设计方法和计算工具,这些飞行器可执行从亚音速到高超音速飞行状态的各种任务,具有各种有效载荷和性能要求,以及各种操作限制。
毫无疑问,无人驾驶飞机已经改变了航空航天的许多方面,而军事应用往往引领着这些变革努力。UCAV 已成为应对未来空战所面临的技术、作战和经济挑战的潜在战略。这些挑战包括第四代战斗机机队的老化、新型先进 4+ 和第五代平台的部署、据报道当前无人飞行器的高脆弱性以及高超音速飞行器和武器的未来发展。
为了研究未来飞机的配置,克兰菲尔德大学飞机设计组的霍华德-史密斯教授于 2012 年设想了 GENUS 飞机设计环境。该框架依赖于一个具有高度模块化和灵活性的中央架构,能够使用类似的分析工具设计、分析和优化多个种类的飞机,揭示新设计的真正差异和潜在优势。
质量估计、推进、空气动力学、性能、雷达截面估计和气动热分析工具已集成到 GENUS 框架中,以研究 UCAV 的设计空间。由于获取 UCAV 和类似配置的高质量数据往往受到限制,因此无法对这些方法进行验证,也无法从中比较和生成更高保真的模型。第9.2节确定并提出了今后提高这些方法准确性的具体步骤。
本研究进行的设计空间探索包括:亚音速 UCAV 执行高-低-高任务的任务参数权衡研究、性能与当前第五代战斗机相当的 UCAV 平台的概念和初步设计、全超音速深度拦截任务权衡研究,以及执行时间紧迫的打击任务的高超音速(M ≥ 3.0)舰载 UCAV。
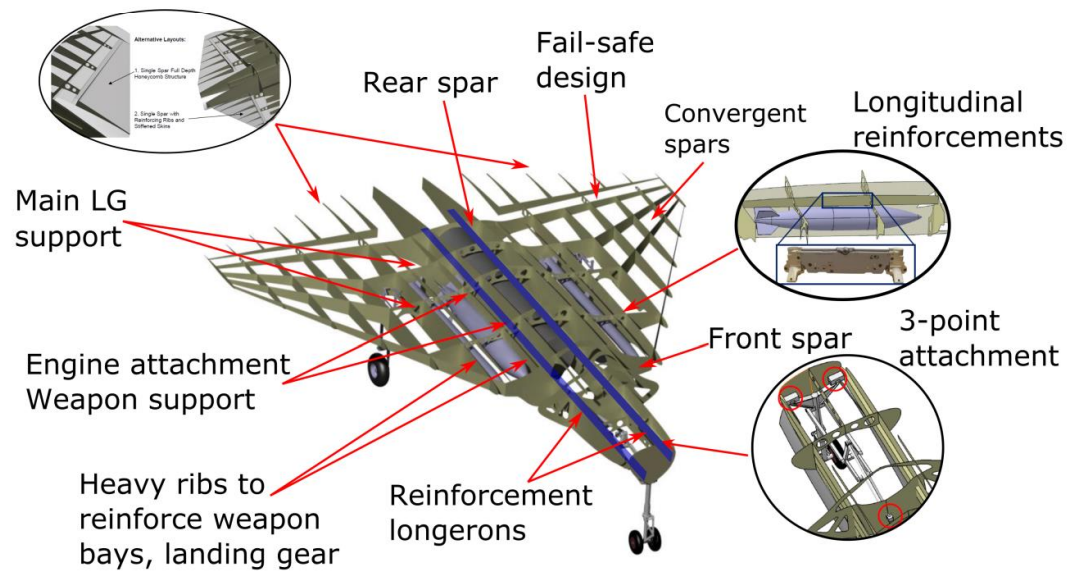
图 UCAV 完整的结构布置(改编自 Sleightholme)。
提纲
第 2 章简要介绍了无人飞行器的发展历史,强调了从最早的空中鱼雷到现代冲突的军事应用。随后,在本研究的背景下对 UCAV 进行了定义,并对联合行动的未来进行了简要展望。还介绍了主要的技术验证计划和当前的 UCAV 设计。本节最后回顾了设计和开发 UCAV 背后的技术挑战。
第 3 章介绍了 GENUS 飞机设计环境、其核心理念、总体结构概述、数据分层和模块之间的数据共享,最后介绍了框架内优化问题的设置;并提供了一个准多目标优化的简要示例。
第 4 章提供了集成到 GENUS 框架各分析模块中的 UCAV 设计方法的技术细节;提供了质量估计、空气动力学、推进建模和雷达截面的验证和确认。由于 UCAV 配置具有从亚音速到高超音速的广阔设计空间,因此在开发这些方法时考虑到了灵活性和可扩展性。除了典型的飞机设计分析模块外,还创建了一套特殊模块来分析非典型学科:通过物理光学近似方法增加了雷达截面估计;作为高超音速运行的一个关键方面,还包括飞行器热负荷分析和燃料热管理系统。
第 5 章介绍了典型对地打击任务(Hi-Lo-Hi)中低可观测亚音速 UCAV 配置的任务和性能权衡研究。在机翼面积不变的情况下,量化了前缘掠角、巡航马赫数、作战半径和比过剩功率对λawing UCAV配置的影响。
第 6 章介绍了为建立第五代 UCAV 设计所做的概念和初步设计工作,该设计旨在与当前的第五代战斗机和未来的第六代战斗机一起进行高度集成和协调的作战行动。这种 UCAV 的任务设计包括亚音速对地攻击剖面和有限的超音速作战能力。已对总体结构概念、发动机尺寸和集成、燃料、动力和执行系统以及起落架尺寸和航电系统设计进行了初步设计研究。
第 7 章涉及各种作战任务、有效载荷和操作要求下的超音速设计概念研究。对马赫数 2.0 的深度拦截任务(Hi-Hi-Hi)进行了研究,并对巡航和冲刺马赫数进行了作战贸易研究。随后,还介绍了航母舰载高超音速打击 UCAV 的作战贸易研究。评估了巡航马赫数、巡航高度和作战半径对重要性能参数(如到达目标时间和热管理限制)的影响。
第 8 章是主要讨论部分,总结了在各种任务和作战限制条件下各类 UCAV 的主要结果和发现。
最后,第 9 章总结了成果、结论和确定的下一步工作。
GENUS飞机概念设计环境
克兰菲尔德大学飞机设计组自 2012 年起开始开发 GENUS 飞机概念设计环境(122)。其名称源于生物分类学的分类方法,代表了在通用架构下设计、分析和优化各种飞机的能力,如图 3-1 所示。
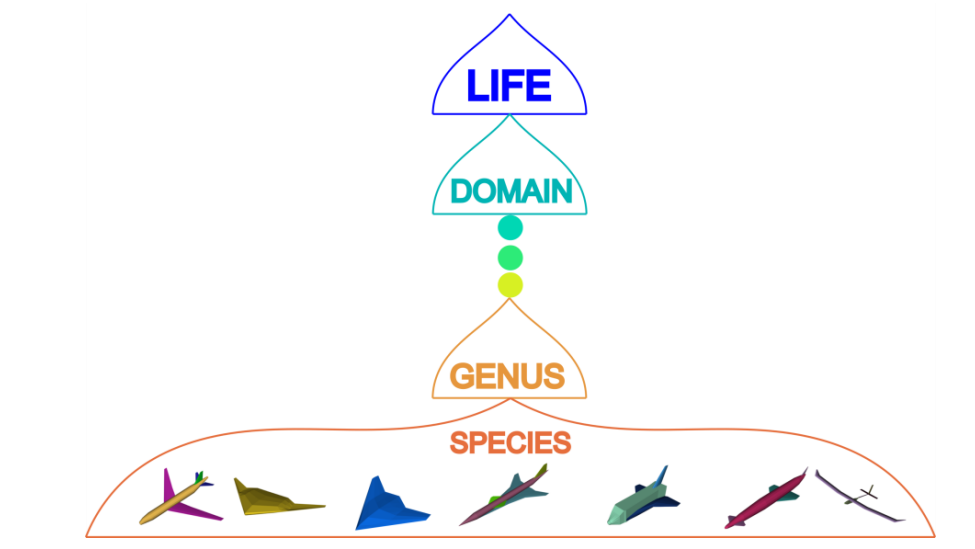
图 3-1 - 适用于飞机的生物分类法
GENUS 是基于 Java 的代码,因此无需客户许可证即可在任何操作系统中运行。Java 的在线支持和开发非常广泛,有多个数值、数学、图形和后处理库可供免费使用,大大提高了框架的潜在能力,同时降低了开发成本。

图 3-2 - Java 与传统代码交互的一般程序
另一个重要特点是 Java 能够通过其 Java 本地接口 (JNI) 实现与 FORTRAN 和 C/C++ 等其他编程语言进行通信。图 3-2 显示了 Java 与传统飞机设计代码(通常用 C、C++ 和 FORTRAN 编写)之间的集成和通信过程。该功能广泛应用于 GENUS 框架的各个分析学科,以增加保真度,而无需长时间重写或独立开发复杂代码。
GENUS 架构的核心理念可概括为以下几个主要方面:
-
模块化: 明确区分不同的分析学科,并按层级编程。抽象类是这一功能的基础,Java 的多态性也为其提供了支持。
-
灵活性: 通过高度抽象化,分析技术可应用于多种飞机,而无需修改核心框架。
-
扩展性: 能够在分析模块中包含各种保真度级别,从经验方法到高保真数值工具。Java 的本地接口及其多态性支持这一方面。特殊模块(下文将解释)可用于添加专业分析工具。
-
健壮性: 一个有凝聚力的框架,依赖于经过良好测试的方法以及适当的错误和异常处理方法。
-
独立性: 在适当情况下,避免使用许可和依赖平台的软件。
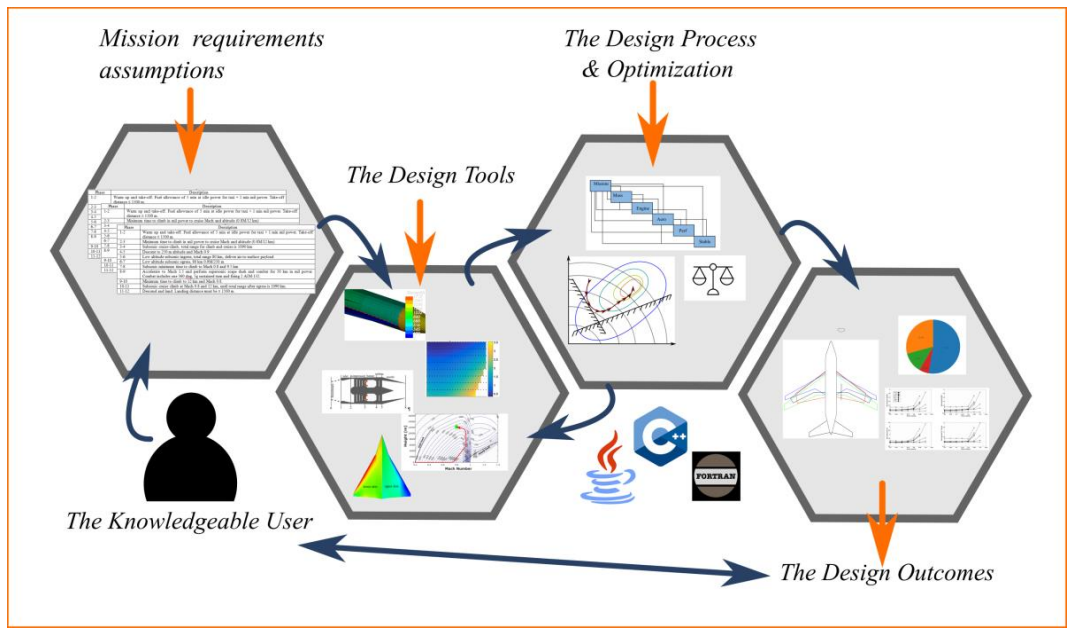
图 3-3 - GENUS 框架的组成部分和相互关系
GENUS 框架不应被视为一个黑盒系统,只需要用户提供最少的输入;相反,GENUS 依赖于一个知识渊博的用户/设计者,以循环和建设性的方式与框架的前端和后端进行交互。这种互动利用了设计者的专业知识、直觉和假设,从而产生新的知识。图 3-3 是用户与框架互动的顶层示意图。
GENUS 核心框架由九个基本模块组成,其中包括 1. 几何 2. 任务 3. 推进规范 4. 质量分解 5. 空气动力学 6. 推进分析 7. 包装 8. 性能 9. 稳定性
所有模块都采用抽象 "GENUS模块 "的结构,如图 3-4 所示。随后,9 个基本模块中的每一个都有一个 "抽象 "模块。如图 3-5 所示,所有特定模块都是这些抽象模块的扩展和实现。
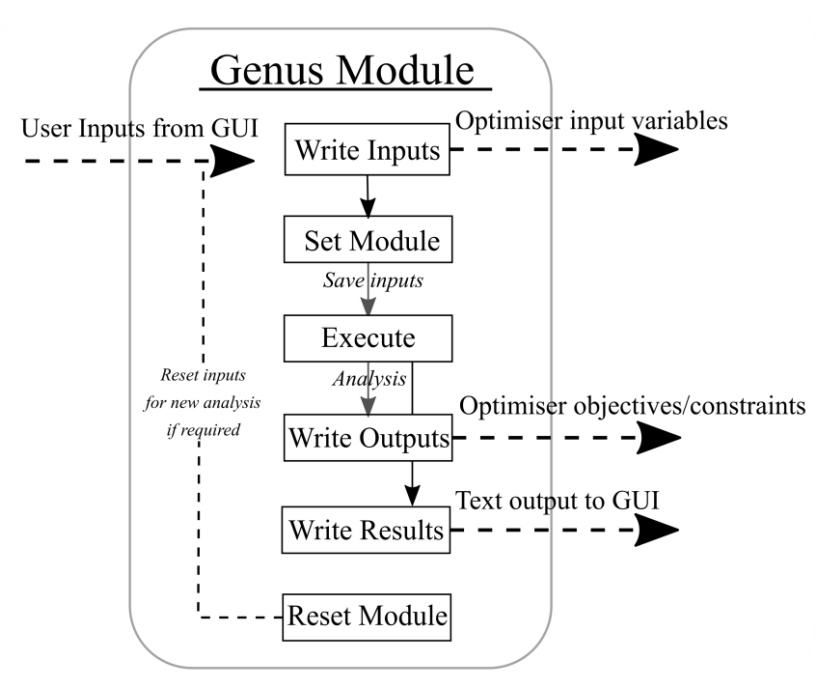
图 3-4 - 抽象 "GENUS模块 "的总体结构
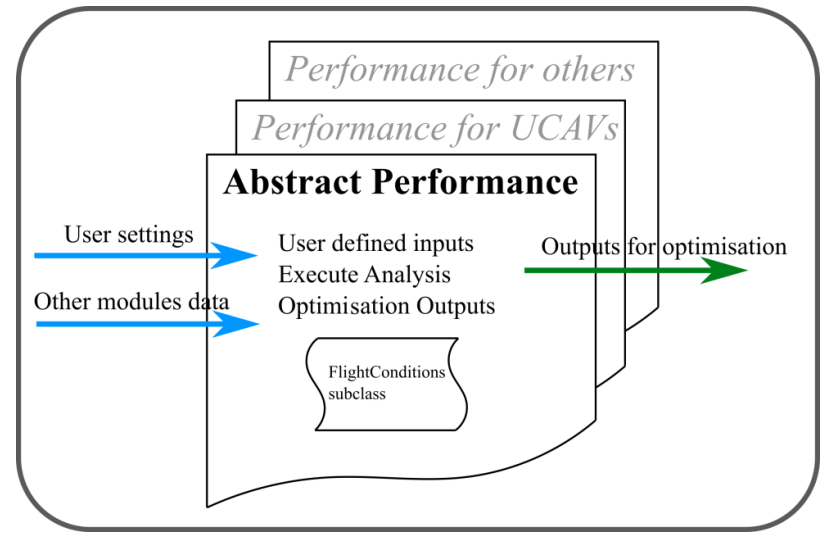
图 3-5 - 性能模块的层次结构和数据流
为了分析飞机设计的非常规方面,可以在原有 Genus 模块的基础上实施一系列特殊模块。特殊模块的例子包括雷达截面分析、音爆强度、成本估算和航空热力学分析。
图 3-6 是一个框架示意图,显示了单个设计实例的启动过程。每个模块都可以根据用户的需要进行输入,然后将输入信息传递到后续模块,如连接箭头和变量所描述的信息流所示。
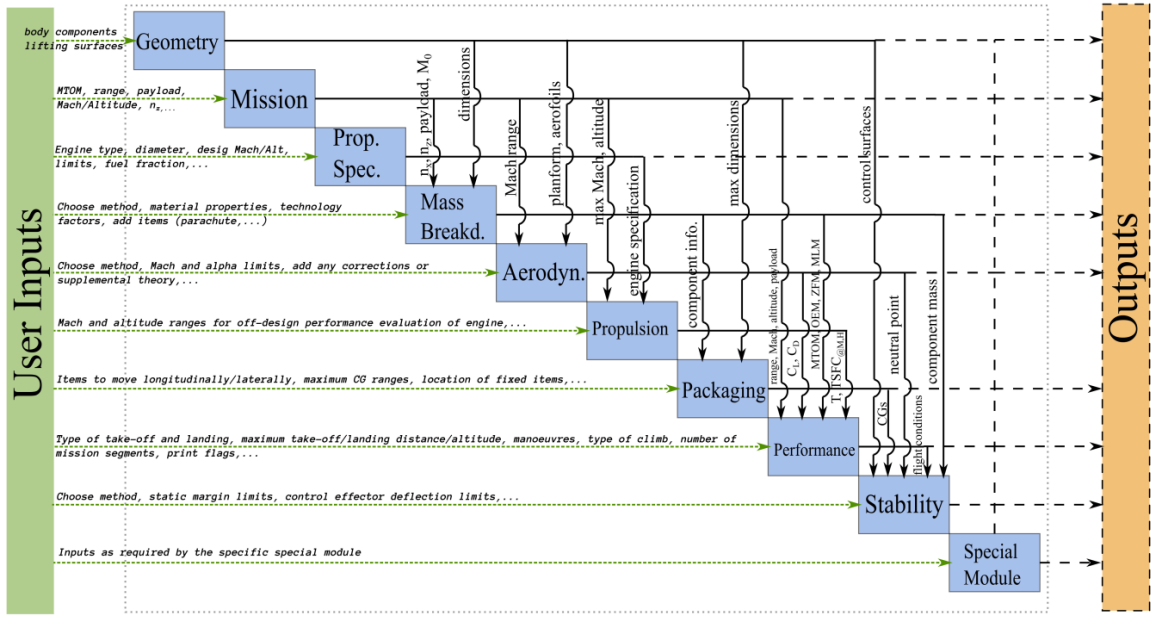
图 3-6 - 在 GENUS 中启动设计实例的 N2 图示例
图 3-7 显示了带有几何和体积约束、质量和燃料收敛误差以及推力和稳定性约束的优化循环的 N2 图。输入变量仅与几何、任务(估计起飞质量)和推进规范模块相对应。该图表示一个固定飞行任务(航程、速度、有效载荷......)的典型收敛优化循环。目标函数箭头来自框架域,一般代表可选择的各种目标;典型目标函数的例子包括最大起飞质量 (MTOM)、运行空重 (OEM)、总耗油量、RCS(特定视角或平均值)等。

图 3-7 - GENUS 优化设计的 N2 图示例

