前沿作战基地(FOB)防御是一项人力密集型任务,需要占用作战任务的宝贵资源。虽然能力越来越强的无人驾驶飞行器(UAV)具备执行许多任务的能力,但目前的理论并没有充分考虑将其纳入。特别是,如果操作人员与飞行器的比例为一比一时,并没有考虑提高无人机的自主性。本论文描述了使用先进机器人系统工程实验室(ARSENL)蜂群系统开发和测试自主FOB防御能力。开发工作利用了基于任务的蜂群可组合性结构(MASC),以任务为中心、自上而下的方式开发复杂的蜂群行为。这种方法使我们能够开发出一种基于理论的基地防御战术,在这种战术中,固定翼和四旋翼无人机的任意组合能够自主分配并执行所有必要的FOB防御角色:周边监视、关键区域搜索、接触调查和威胁响应。该战术在软件模拟环境中进行了广泛的测试,并在现场飞行演习中进行了演示。实验结果将使用本研究过程中制定的有效性措施和性能措施进行讨论。
第1章:导言
1.1 背景和动机
2019年,美国海军陆战队司令大卫-H-伯杰将军发布了他的规划指南,作为塑造未来四年的部队的一种方式。他在其中指出:"我们今天做得很好,我们明天将需要做得更好,以保持我们的作战优势"[1]。这句话摘自海军陆战队司令大卫-H-伯杰将军的《2019年司令员规划指南》(CPG),呼吁采取集中行动,以应对海军陆战队在未来战争中预计将面临的不断变化的挑战。在为海军陆战队确定未来四年的优先事项和方向的CPG中的其他指导,呼吁建立一个 "适合侦察、监视和提供致命和非致命效果的强大的无人驾驶系统系列"[1]。伯杰将军进一步呼吁利用新技术来支持远征前沿基地作战(EABO)。EABO将需要灵活的系统,既能进行有效的进攻行动,又能进行独立和可持续的防御行动。简而言之,实现EABO将需要最大限度地利用每个系统和海军陆战队。
从本质上讲,伯杰将军正在呼吁改变无人驾驶飞行器的使用方式。通过使用大型的合作自主无人飞行器系统,或称蜂群,将有助于实现这一目标。无人飞行器蜂群提供了在人力需求和后勤负担增加最少的情况下成倍提高战场能力的机会。正如伯杰将军所提到的 "下一个战场",海军陆战队将必须利用各种技术,最大限度地利用自主性和每个作战人员在战场上的影响。
目前的无人系统使用理论是以很少或没有自主性的系统为中心。另外,目前的系统依赖于单个飞行器的远程驾驶;也就是说,每辆飞行器有一个操作员。部队中缺乏自主系统,这在监视和直接行动的作战能力方面造成了差距。此外,侧重于一对一操作员-飞行器管理的无人系统理论要求操作员的数量与车辆的数量成线性比例。这对于 "下一个战场 "来说是不够的。相反,海军陆战队将需要能够让操作员摆脱束缚或提高他们同时控制多个飞行器的能力系统[2]。
考虑到这些目标,美国海军研究生院(NPS)的先进机器人系统工程实验室(ARSENL)已经开发并演示了一个用于控制大型、自主、多飞行器的系统,该系统利用了分布式计算的优势,并将驾驶的认知要求降到最低。ARSENL在现场实验中证明了其系统的功效,在该实验中,50个自主无人驾驶飞行器(UAV)被成功发射,同时由一个操作员控制,并安全回收[3]。
1.2 研究目标
这项研究的主要目标是证明使用无人机蜂群来支持前沿作战基地(FOB)的防御。特别是,这需要自主生成、分配和执行有效的、符合理论的基地防御所需的子任务。这部分研究的重点是开发基于状态的监视、调查和威胁响应任务的描述;实施支持多飞行器任务分配的决策机制;以及任务执行期间的多飞行器控制。
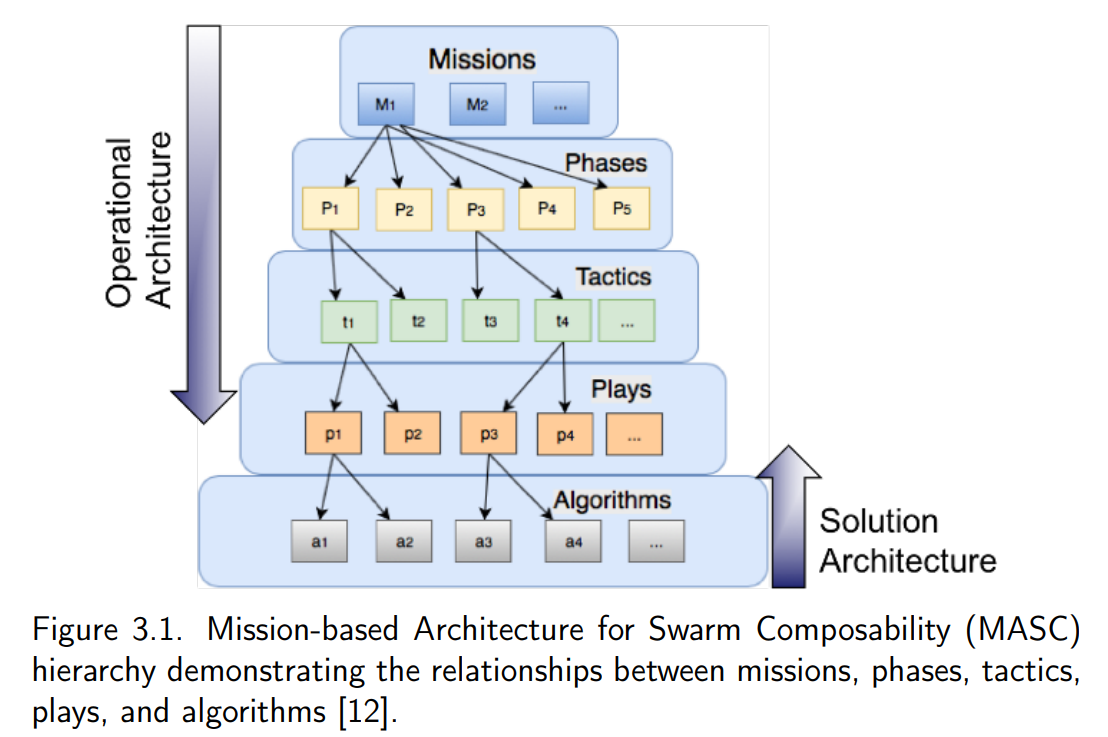
辅助研究目标包括展示基于任务的蜂群可组合性结构(MASC)过程,以自上而下、以任务为中心的方式开发复杂的蜂群行为,探索自主蜂群控制和决策的分布式方法,以及实施一般的蜂群算法,并证明了对广泛的潜在蜂群战术有用。总的来说,这些目标是主要目标的一部分,是实现主要目标的手段。
1.3 方法论
基地防御战术的制定始于对现有基地防御理论的审查。这一审查是确定该行为所要完成的基本任务和子任务的基础。然后,我们审查了目前海军陆战队使用无人机的理论,以确定这些系统在基地防御任务中的使用情况。
在确定了任务要求的特征后,我们为基地防御的整体任务制定了一个高层次的状态图。子任务级别的状态图等同于MASC层次结构中的角色。
ARSENL代码库中现有的算法和游戏以及在研究过程中开发的新算法和游戏被用来在ARSENL系统中实现子任务级的状态图。最后,根据高层次的状态图将这些游戏组合起来,完成基地防御战术的实施。
在游戏和战术开发之后,设计了基于理论的有效性措施(MOE)和性能措施(MOPs)。通过在循环软件(SITL)模拟环境中的广泛实验,这些措施被用来评估基地防御战术。在加利福尼亚州罗伯茨营进行的实战飞行实验中,也展示了该战术和游戏。
1.4 结果
最终,本研究成功地实现了其主要目标,并展示了一种包含周边监视、关键区域搜索、接触调查和威胁响应的基地防御战术。此外,开发工作在很大程度上依赖于MASC层次结构,以此来制定任务要求,并将这些要求分解成可在ARSENL蜂群系统上实施的可管理任务。这一战术在实战飞行和模拟环境中进行了测试,并使用以任务为中心的MOP和MOE进行了评估。最后的结果是令人满意的,在本研究过程中开发的战术被评估为有效的概念证明。
1.5 论文组织
本论文共分六章。第1章提供了这项研究的动机,描述了这个概念验证所要弥补的能力差距,并提供了ARSENL的简短背景和所追求的研究目标。
第2章讨论了海军陆战队和联合出版物中描述的当前海军陆战队后方作战的理论。还概述了目前海军陆战队内无人机的使用情况,并描述了目前各种系统所能达到的自主性水平。
第3章概述了以前自主系统基于行为的架构工作,ARSENL多车辆无人驾驶航空系统(UAS)和MASC层次结构。
第4章对基地防御战术的整体设计以及高层战术所依赖的游戏进行了基于状态的描述。本章还详细介绍了用于创建、测试和评估这一概念验证的方法。在此过程中,重点是对每一战术和战术所针对的MOP和MOE进行评估。
第5章详细介绍了所进行的实战飞行和模拟实验,并讨论了与相关MOPs和MOEs有关的测试结果。
最后,第6章介绍了这个概念验证的结论。本章还提供了与基地防御战术本身以及更广泛的自主蜂群能力和控制有关的未来工作建议。