海洋论坛丨水声目标识别技术现状与发展
近年来,随着潜艇降噪技术的进步,水下无人航行器迅速发展,鱼雷和水雷等水下武器呈多样化趋势,海战场环境更为复杂。水声目标识别是反潜、鱼雷防御和水声对抗的前提,已成为重要研究课题。现阶段水声目标识别主要通过提取目标特征量区分目标类型和种类信息。本文针对舰船、鱼雷和干扰等目标,介绍了水声识别方法及目标综合识别的3类算法模型;阐述了国内外水声目标识别技术发展历程与现状;基于现有技术局限和环境影响分析了水声目标识别存在问题并展望了未来技术发展方向。

一水声目标识别

近年来,水声目标身份识别已成为水声目标研究热点。水声目标识别主要依据目标特征信息。目标特征信息是目标原始数据中包含或可提取的一种能精确和简化表明目标状态和身份的信息。水声目标主要包括噪声、运动、尾流和几何结构等特征信息。不同水声目标的特征信息不同,如潜艇和鱼雷几何结构不同,其声呐探测目标尺度特征不同;潜艇和水面舰船噪声辐射能量差异表现为目标尾流不同。
⒈识别方法
水声目标识别方法包括以下7种:
⑴噪声特性:水面舰船和潜艇噪声主要包括机械、螺旋桨和水动力噪声;鱼雷和水下潜航器噪声主要是推进系统噪声,声源强度相对较弱。通常,水声目标辐射噪声能量主要来自螺旋桨和机械噪声,舰艇航行状态(包括深度、速度和加速度等)决定了哪种噪声起主导作用。同类舰船的辐射噪声具有一定相似性,不同类舰船的动力系统和机械结构不同,其辐射噪声特性存在差异,故利用辐射噪声特性差异可实现水声目标分类。
⑵运动特征:不同水声目标的职能、工作状态和运动状态均不同。水声目标运动状态(包括航行速度、方位角变化率和加速度等)及突变等行为均与其使命和任务相关。此外,水声目标的行为、状态和类型具有关联性,通过预估目标运动状态可预测目标任务/职能,从而实现目标分类。水声目标运动特征物理意义明确,不易受噪声和信道干扰,可分性较好。利用这些特征作为识别依据可提高识别系统性能,如直航鱼雷与尾流自导鱼雷打击轨迹不同,水下高速目标一般是鱼雷而非潜艇和水雷。
⑶目标尺度:水面舰船和潜艇目标尺寸较大,是较大目标,一般潜艇长约100m,水面舰船尺寸更大。由于其尺寸远大于鱼雷、无人潜航器(UUV)和干扰器(声诱饵)等,因此目标几何尺寸也可作为重要的识别特征量。若能提取目标尺寸特征量就能有效判别常用水声干扰器与真实目标,从而增强情报准确性,提升反潜、鱼雷防御和水下目标打击等能力。常用方法为时空分析法,通过目标区域波束空间扫描,对接收信号进行特性分析,结合回波方位与扫描偏移量实现目标尺度估计。
⑷目标排水量:不同类型舰船排水量不同,通常,巡洋舰排水量>驱逐舰排水量>护卫舰排水量。不同类型舰船在巡航状态下噪声强度与航速和排水量有关,航速越高,吨位越大,则辐射噪声强度越高。
舰船噪声声源级表明辐射声能量特征量,利用目标距离和对应信道衰减,可估计目标声源级。罗斯根据测量资料统计,对于航速为8~24节(1节=1.852km/h)的舰船在0.1~10KHz频带内,舰船噪声总声源级、航速以及吨位三者间关系经验公式如下:
SL=112+50lg(V/10)+15lgT ⑴
SL=134+60lg(V/10)+9lgT ⑵
其中,SL为0.1~10KHz频带总声源级;V为航速,单位节;T为吨位,单位t。参考声压为1μPa,不适用于超过30000t的舰船。式⑴和式⑵较简单,直接表明声源级、速度和吨位间关系,实际舰船总声源级计算更复杂。不同类型和吨位的舰船总声源级不同,吨位和航速决定的宽带总声源级差异较大时,舰船噪声总声源级对舰船吨位分类有价值。
⑸目标主动声呐特性:不同的舰船、潜艇和鱼雷均装备不同型号声呐,而不同型号主动声呐的频段、周期、脉冲和脉冲宽度等参数均不同。因此,根据探测目标的主动声呐特性,如工作带宽、脉冲周期、工作下限频率和上限频率等,可识别声呐型号,通过排除法缩小识别范围,进一步结合其他目标特征完成目标综合识别。
⑹目标运动逻辑:从战术角度分析,当目标发现鱼雷来袭,一般会施放声诱饵和干扰器,然后逃离攻击范围。该战术行为会产生以下2种逻辑信息:①目标背离鱼雷,寻求快速脱离攻击范围,鱼雷相对于目标多普勒速度减小或为负。当鱼雷同时收到目标信号和干扰器信号时应进行多普勒逻辑判断,有负多普勒频移的信号可优先判定为目标。②干扰器投放距离一般不远,投放后会远离目标,目标投放干扰器和声诱饵旨在干扰鱼雷正常航行,但同时也暴露了目标位置区域。因此,鱼雷同时探测到2种信号时,可选择较远目标,通过设置距离选通门限(一般在干扰器以外200m处),从而屏蔽干扰器信号,追踪真实目标。
⑺假目标特性排除:干扰器和声诱饵体积较小,在较远距离可看作点声源,其方位走向近似为一条水平线。因此,检测到点源干扰器时需进一步分析目标方位走向,若其走向不超过设定门限可判定为假目标。
⒉综合算法
目标识别算法种类较多,包括统计算法(如经典推理、Bayes推理和D-S证据理论)、特定方法(如聚类分析和模板法)、新的智能算法和系统(如专家系统、遗传算法和深度学习等)以及延伸出的自适应神经网络技术。总体来说,可分为物理模型、特征推理技术和基于知识的模型3类算法。
⑴物理模型
传感器观测目标并产生观测特征量,目标身份识别处理指将观测数据与数据库中存储的特征/模拟信号进行比对,包括过程预测与观测数据间的相关性处理,若相关系数>门限,则身份匹配成功。图1给出了物理建模的身份识别框架。物理建模复杂且计算量巨大,实时系统中应用受限,因此物理建模主要用于非实时系统研究。
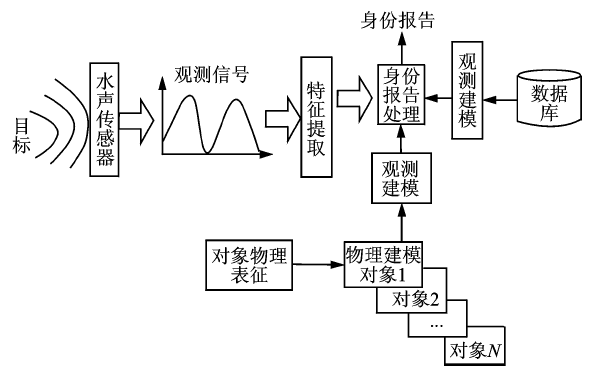
图1 物理建模的身份识别框架
⑵特征推理技术
特征推理技术包括参数模板法、聚类分析法、经典推理、Bayes推理、D-S证据理论和神经网络技术等。
①参数模板法:模式识别的基本方法,利用先验知识分解多维特征空间,每个区域代表一种身份类别,再提取特征量形成特征空间,并将提取的特征向量与特征空间比对,判断是否落入某特征区间,从而实现目标身份识别。
②聚类分析法:根据待分类特征量相似度进行分类,如相似则归为一类,否则归为另一类,从而完成目标分类。
③经典推理:指用二值假设检验方法在已知先验概率条件下判别事件存在与否。
④Bayes推理:指在给出前面对假设的似然估计和增加证据/观测情况下更新假设似然函数,给出证据条件下假设的后验概率。该方法特点是假设需相容,备选假设需具有完备定义。Bayes融合过程如图2所示。
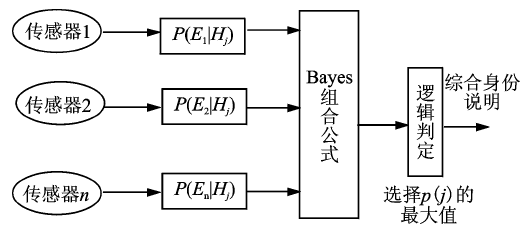
图2 Bayes融合过程
⑤D-S证据理论:Bayes理论的推广,无需假设完备性,即可应用于笼统的不确定性水平情况。选择概率区间/不确定性区间依据多个证据确定假设的似然性,可处理随机性和模糊性导致的不确定性,并给出对命题的支持和信任度区间以及总的不确定性水平。
⑥神经网络技术:指模仿生物神经系统的过程,其识别成功率依赖训练神经网络模型的最佳加权矩阵和训练数据等,误差反传(BP)神经网络模型如图3。神经网络算法可应用于线性和非线性环境,通常由输入层、隐藏层和输出层3部分组成,每层均包含若干个神经元,数据向量从网络左边输入,神经网络完成非线性变换,在网络右侧输出。该变换能产生从数据到聚类分析技术形成的身份类别的变换,神经网络可将多传感器数据变成一个实体联合身份说明。用目标真实数据预先训练神经网络,再应用于实际系统,对接收的各种信号进行处理,可得到较准确的识别结果。
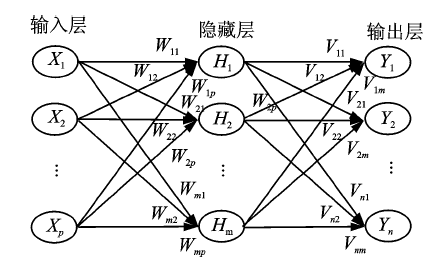
图3 BP神经网络模型
⑶基于知识的模型
基于知识的模型(如专家系统)进行身份识别时,效仿人工身份识别的认知途径。识别处理先收集实体基本分量数据,并对照知识库处理观测量,若条件符合则认定对象身份。图4给出了基于知识的身份识别框架。
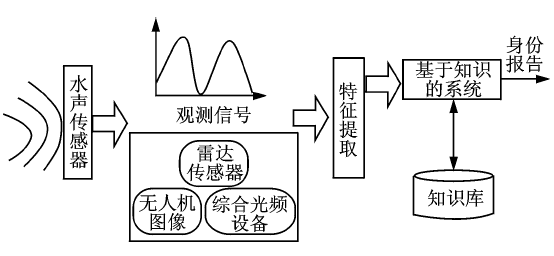
图4 基于知识的身份识别框架
二历史与现状
20世纪50年代初,随着信号检测技术、信息论和计算机技术快速发展,水声信号处理成为独立分支,并迅速发展,为现代声呐技术发展奠定了基础。
1975年,美国斯坦福大学的E.Feigenbaum和H.P.Nii等研制出水下预警专家系统(HASP)并不断改进,先后推出SIAP、舰载声呐预警专家(CLAIMS)和海洋监测专家系统(THESUS)等系统。1988年研制出第4代实时分析专家系统(SES)。其中,HASP系统仅简化处理并手工产生数据,分类较简单,但该系统证明了人工智能系统可采用非常规信号处理技术处理声信号。1980年提出的SIAP系统将前端信号处理算法和推理部分合为1个耦合系统,减少了人工参与。1984年提出的CLAIMS系统改进了SIAP系统并将其应用于舰载声呐,通过增加特征量和模型提高了系统可信度。
1985年提出的THESUS系统在CLAIMS系统上做了较小改动,并将其应用于海底多传感器监视。此后,经过十多年改进,SES已用于拖曳声呐,且具备较好目标识别能力。
1983年,加拿大的J.N.Maksym等开发了舰船噪声分析专家系统(INT-ERSENSOR)。该系统对有关知识表示、线谱检测与提取以及推理机制进行了深入研究,目前仍有较高参考价值。
20世纪80年代末,印度的B.Sankaranrama等研制出水下被动目标识别专家系统(RETSENSOR)。通过高阶统计量方法提取舰船辐射噪声特征量,从接收的噪声中提取螺旋桨叶片数、目标壳体辐射低频噪声、最大速度、螺旋桨转速、动力装置类型、喷嘴噪声、活塞松动产生的谐音基频、槽极噪声和传动装置类型9大特征量,每个特征量赋予1个精度因子,利用D-S证据理论组合多种证据,从而利用专家系统识别4类目标。90年代,R.Rajagopal等将专家系统、神经网络技术和统计模式识别进行结合,提高了系统对目标识别能力。英国科学家C.R.Gent等将神经网络技术引入被动声呐识别系统,采用窄带、宽带、瞬态和解调制谱(DEMON)等分析方法,利用神经网络技术学习能力,增强了系统容错性,即使训练样本不平衡系统仍有较好性能。
20世纪90年代以来,随着潜艇性能提升,安静级潜艇逐渐普遍,无人潜航器快速发展,水下鱼雷种类增多,单平台探测辐射噪声难以有效识别水声目标。美军已在新型潜艇和舰船上装备了舰内和舰外传感器平台组成的水声融合系统,通过多传感器和多信息资源的融合提高水声目标识别能力,事实表明多传感器融合系统能有效提高水声目标识别的准确性和可靠性。
2010年以来,随着多传感器综合识别手段的日益成熟,水声目标探测和识别不再局限于声学应用。以美国为代表的西方国家研究了水声目标非声探测技术,如水下激光、电磁、尾流和排放物检测等多样化探测手段,为水声目标识别提供更多的识别依据和要素。
国内水声目标识别领域起步较晚,但在国防需求和海洋工程的推进下,越来越多的科研人员开始从事该领域研究。中科院声学研究所、西北工业大学、哈尔滨工程大学、上海交通大学、舰船第7研究院和东南大学等单位均对水声目标识别进行了大量研究,并将计算机技术、现代谱估计、人工智能算法和信号处理技术及数据融合技术应用于水声目标识别领域,取得了丰硕成果,缩小了与西方国家的差距。
陶笃纯等研究了舰船螺旋桨空化噪声和噪声节奏的物理机制,给出了舰船噪声线谱幅度起伏模型,为线谱和连续谱分析提供了依据,并给出了一种线谱特征提取方法。魏学环等研究了舰船低频噪声,将低频线谱噪声与螺旋桨转速等工作特征联系起来,给出了提取螺旋桨识别特征的2种途径,利用聚类分析技术实现舰船分类和识别。吴国清等深入研究了舰船噪声,通过提取舰船噪声线谱、平均功率谱和双重频率谱等特征,利用模式识别和模糊神经网络技术分类识别目标。
李启虎等研制了Explore水声目标识别专家系统,利用线谱平均值、相邻线谱平均周期、连续谱最大值位置、从最大值开始的斜率、线谱数和振幅最大线谱位置6个特征量,采用模糊逻辑和聚类分析技术分类识别炮艇、货船、渔船、驱逐舰和潜艇等目标,信噪比≥3dB时,识别准确率≥75%。
励荣锋等研究了各类水声目标功率谱分析,提取了目标时频特征,并通过实际数据分析进行了可分性验证。凌青等研究了浅海信道中舰船噪声包络谱传播特性,提取分析了包络线谱特征,应用于目标检测和分类。胡桥等为解决水声目标小样本识别问题,提高复杂海洋环境中的识别精度,提出了一种基于经验模式分解(EMD)、特征距离评估技术(FDET)和组合支持向量机(CSVMS)的水声目标识别方法。
三发展方向
吸声和隔声材料工艺提高、发动机减振降噪技术提升、仿生技术发展、干扰器种类多样化以及水声目标噪声特征信息弱化导致水下目标难以发现,从而对水声目标识别研究提出了更高要求。同时,水声目标识别技术和途径也逐渐多样化,已从单源目标识别提高到作战系统层次综合识别。未来可能的发展方向主要是非声探测、多传感器信息融合和智能目标识别等。
安静级潜艇应用给复杂的水下目标探测提出更高要求。潜艇噪声微弱,导致传统声学探测手段失效,亟需其他探测手段。冷战时期,美国研究并初步运用了潜艇尾流和潜艇排放物探测等非声探测技术,但因海洋环境模型缺乏和实时运算模型能力有限,未得以广泛应用。随着建模和大数据快速发展,实时运算复杂海洋环境能力已具备,目前可检测出安静型潜艇造成的微弱环境变化。2015年1月22日,美国战略与预算评估中心(CSBA)发布的《水下战新纪元》报告称,为继续保持水下优势,美国正加快研发新兴技术,大力发展非声探测技术。
水声目标单源识别性能较差,不同型号传感器性能各异,职能侧重点不同,单源识别信息不完备。水声目标识别在未来发展中将更注重多平台和多传感器数据融合综合识别。利用海、陆和空3大平台构建的作战网络实现舰载声呐、浮标声呐、水下无人探测器、海底声呐阵、卫星和无人机等全方位信息目标综合识别,可有效提高目标识别准确性和可靠性。
目前,水声目标识别手段仍以查询数据库为主,但受数据库不完备、海战场环境复杂和传感器性能不足等因素制约,识别过程仍需人工参与。人工智能技术与水声目标识别有机结合将是今后研究的重要发展方向。AlphaGo的出现标志着人工智能时代开启,利用人工智能提高对水声目标识别能力并有效支撑指挥员决策同样值得思考。
四结束语
本文从噪声特征、运动特征、物理特征和运动逻辑等方面对常见的水声目标识别方法进行了描述,分析了每种识别方法的特点,并介绍了水声目标综合识别的3类算法。此外,简述了水声目标识别国内外发展历程与现状,结合现有水声目标识别问题与技术发展,提出了水声目标识别未来发展方向及可能遇到的瓶颈。
【作者简介】强超超,男,1991年出生,中国船舶重工集团公司第709研究所,工程师,研究方向为水声数据融合;王元斌,男,1976年出生,中国船舶重工集团公司第709研究所,研究员级高级工程师,研究方向为指挥控制系统总体和目标识别。文章来自《指挥信息系统与技术》(2018年第2期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有,

Swarm Pack无人机室外编队表演套装:让编队表演变得更简单
PX4 使用手册 - 自主避障 - Obstacle Avoidance