如何设计室内AR导航系统?
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
随着技术的不断发展,在未来几年中,基于AR的室内导航应用在不同消费领域会出现大规模的增长。
室内导航与室外导航在复杂程度上有很大不同。对于户外导航,数百万人目前使用这项技术,因为它对性能要求不高;现代智能手机甚至智能手表都内置了GPS和地图。而AR室内导航技术相当复杂,它包含3个必须考虑的模块:定位,映射和渲染。
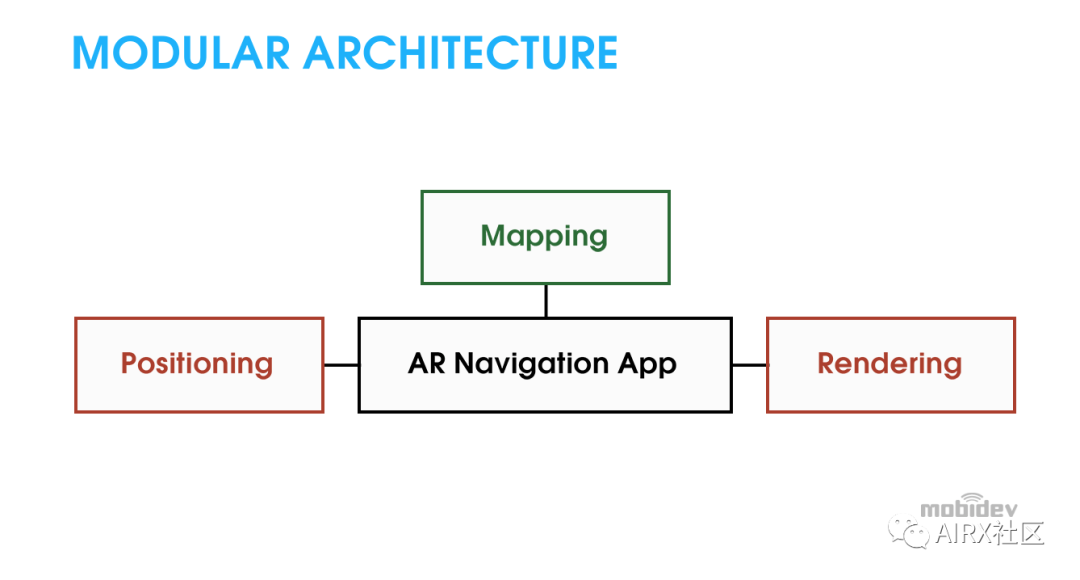
映射是唯一简单的模块(Mapping)。有了地图和坐标,就很容易制作路线。该模块易于根据给定的业务用例/需求进行升级和定制。
渲染模块管理AR内容的设计,其工作直接取决于定位的精度。我们可以轻松地以3D绘制路线,但是在将虚拟对象与现实世界进行匹配时面临一些挑战。渲染的质量和精度将取决于AR SDK等(例如ARKit、ARCore等)。
在定位方面,情况变得有些艰巨。没有准确的方法来确定用户在室内的确切位置,包括确切的楼层。确定正确的精度水平也是一个挑战。例如,十米够吗?5米呢?还是1米?
室内定位的可用技术
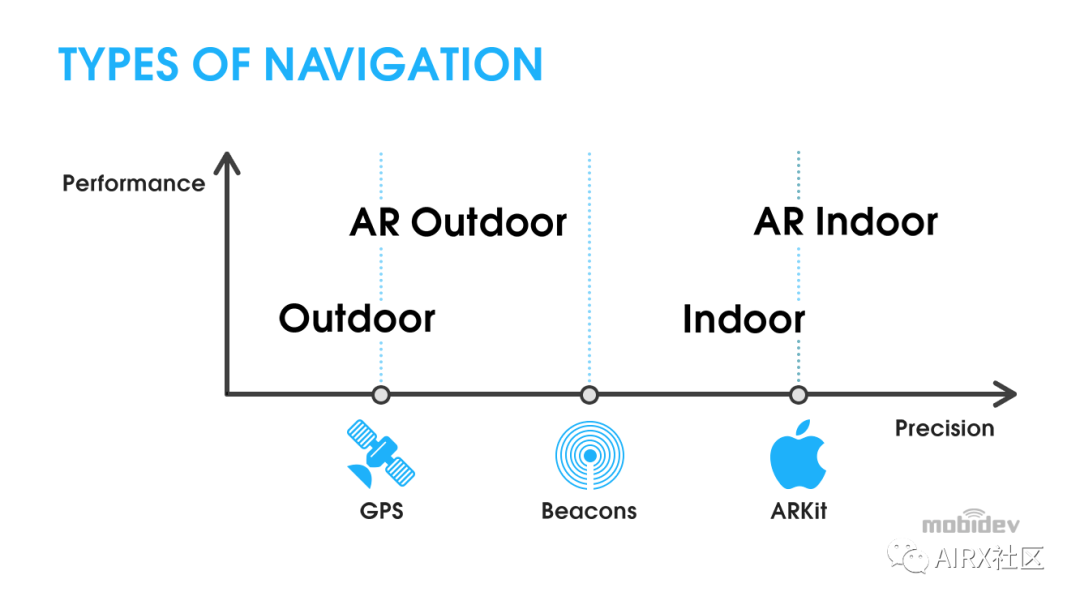
用于室内定位系统的GPS:GPS是导航领域中的现有技术之一,但是,它不能提供建筑物内部的准确定位。在大型和低层建筑(例如机场)中,它相对准确;但它无法确定更详细的信息,例如楼层号,而实现此目的的唯一方法是手动进行操作,例如使用Apple或Google Maps进行操作的方法。这里的要点是GPS可以正常工作,但这不是一个可行的解决方案。
视觉定位系统(VPS):视觉定位系统(VPS)具有很大的前景。例如,谷歌使用街景数据,以周围的建筑物为参考点,以表明用户在基于AR的户外导航中的位置。另外ARKit 2引入了ARWorldMap类,它也可以起到类似的作用。
但是,我们不能完全仅依靠ARWorldMap来确定室内定位的确切位置,因为:
办公室通常在不同的地方看起来是相同的,也就是说,不同楼层的房间和走廊可以相同。
内部可能会随时发生变化。
复杂的计算会使该解决方案变慢。
基于Beacon的室内定位:最常见的例子是安装在英国盖特威克机场的2000个电池供电的低能耗蓝牙Beacon,他们声称,这些Beacon可以提供+/- 3m精度。但是根据苹果的文档,Beacon只能给出一个近似的距离值,因此我们不能依靠信号强度来手动计算这些数据。当你考虑到成本(每件10-20美元)、电池更换(每1-2年一次)和工作距离(10-100米)等其他因素时,很明显,使用Beacon进行室内导航只有在某些条件下才有效。但总的来说,Beacon仍然可以做得很好,因为目前市场上的大多数室内导航技术都是基于Beacon的,并且只使用增强现实技术来实现路线可视化。
Visual Markers-基于ar的室内定位导航解决方案:Visual Markers,也称为AR标记。Visual Markers是由苹果的ARKit,谷歌的ARCore和其他AR sdk识别的图像。视觉标记用于告诉应用程序将AR内容放在哪里。。如果我们在空间的某个地方,地板上或墙上放置一个视觉标记,并把它的确切位置存储在云里,那么,当扫描时,我们将收到它在现实世界中的确切坐标。
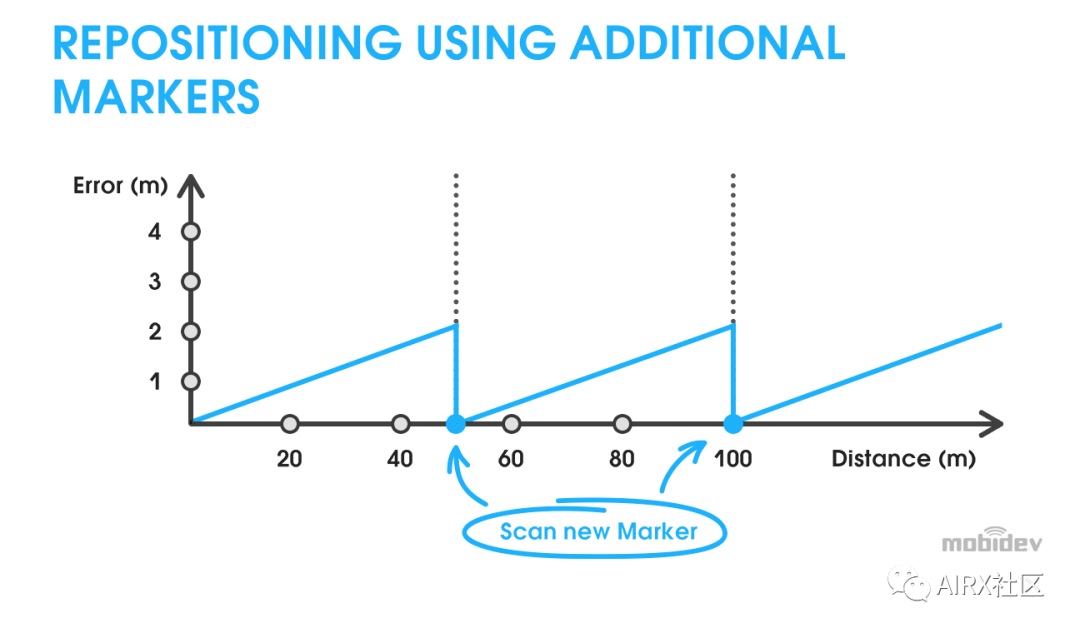
室内定位精度水平如何?客户通常想知道他们的应用程序的精确度是多少。我们发现,离起点越远,结果就越不准确。为了解决这个问题,新的视觉标记必须平均每50米放置一次。
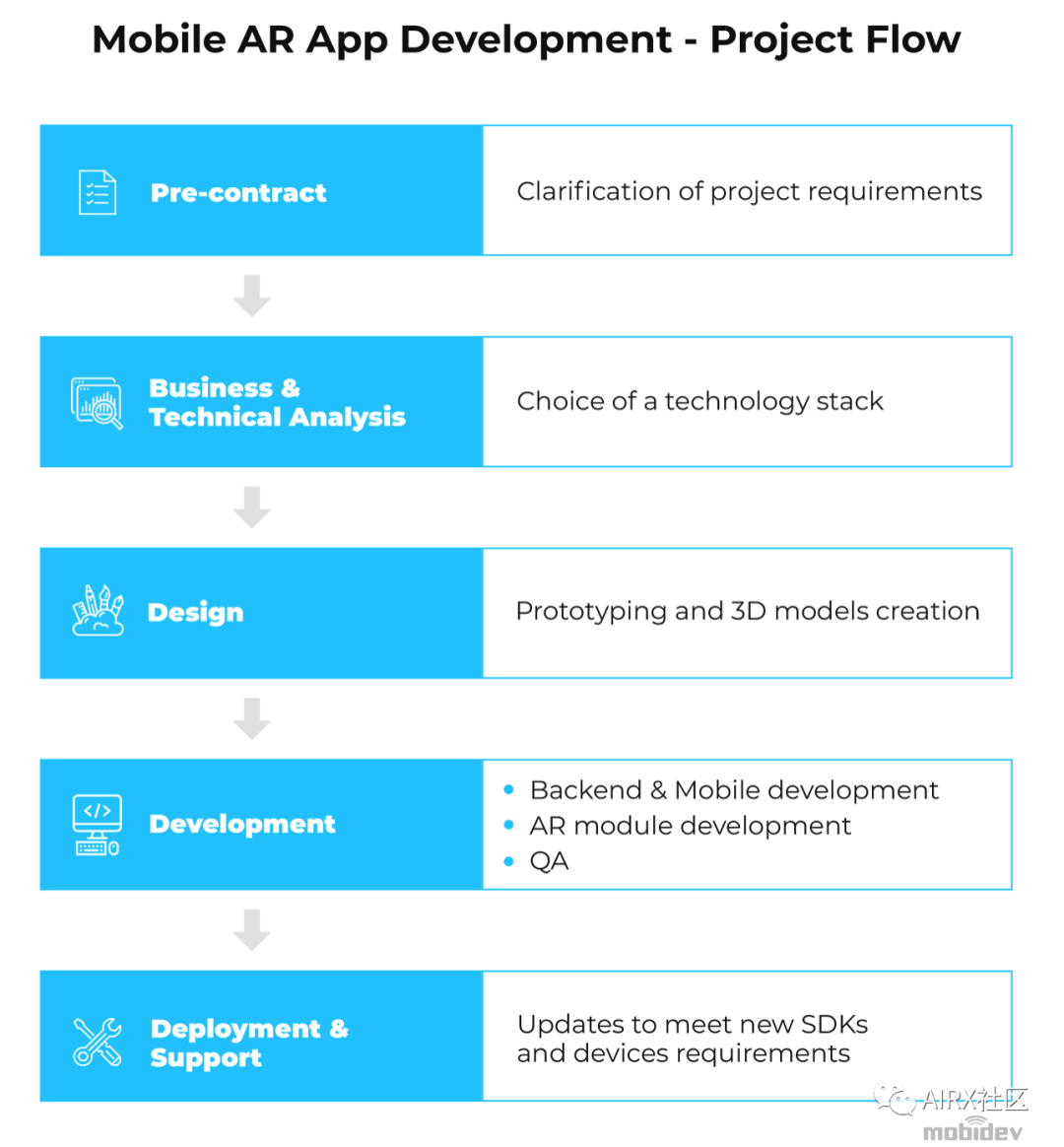
如何开发基于AR的室内导航应用
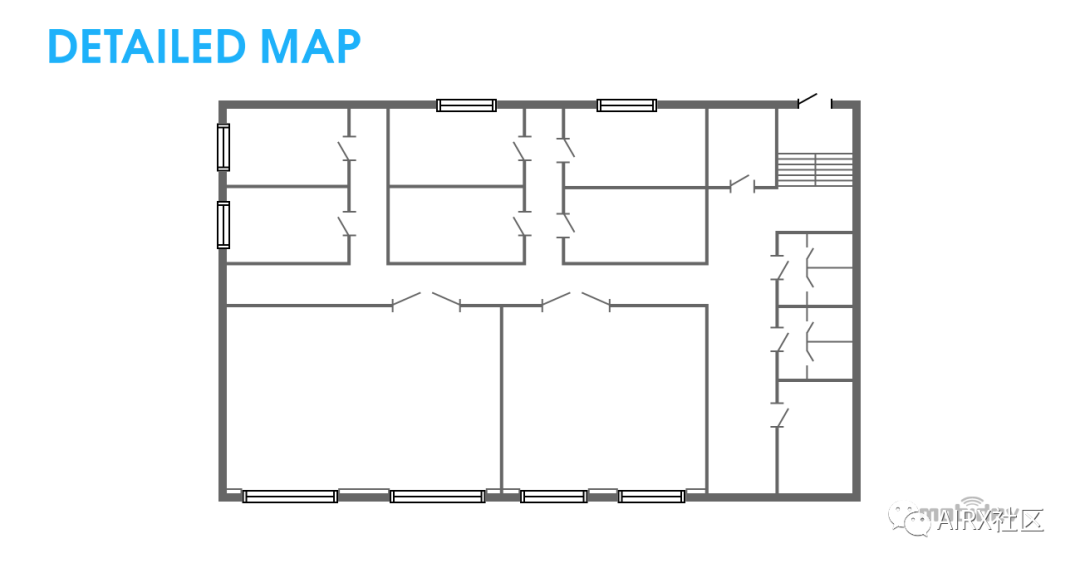
1、为AR室内导航绘制地图
没有地图,室内导航是不可能的。同样,找到具有所需图片质量和可伸缩性的特定建筑的地图并不总是常见的。这就是为什么你需要自定义地图。我们的过程通常是这样的:使用笛卡尔坐标系创建一个地图,这是在3D图形和ARKit中使用的,然后用谷歌Maps的卫星图像与地理坐标和方位对齐地图。在这里,不需要太多的准确性,所以不需要特殊的设备。
注意:使用位图图像不是最好的选择,因为每个映射都是矢量图像,用于高质量的缩放和最小的传输数据,以确保高性能。此外,在设计阶段,不建议使用AR标尺,因为它存在一定的误差。这非常适合绘制草图,但是通过使用传统的测量工具,可以确保地图的绝对准确性。
下一步添加用于导航的元数据:走廊和房间以创建图形。然后分析周围环境并适当地添加视觉标记,即在入口,大厅,电梯附近等。
需要注意确保地图与现实世界匹配。为此,必须将物理视觉标记放置在计划中标记的特定点上。物理标记的位置必须与它们在数字地图上的位置完全匹配才能更正和调整位置。
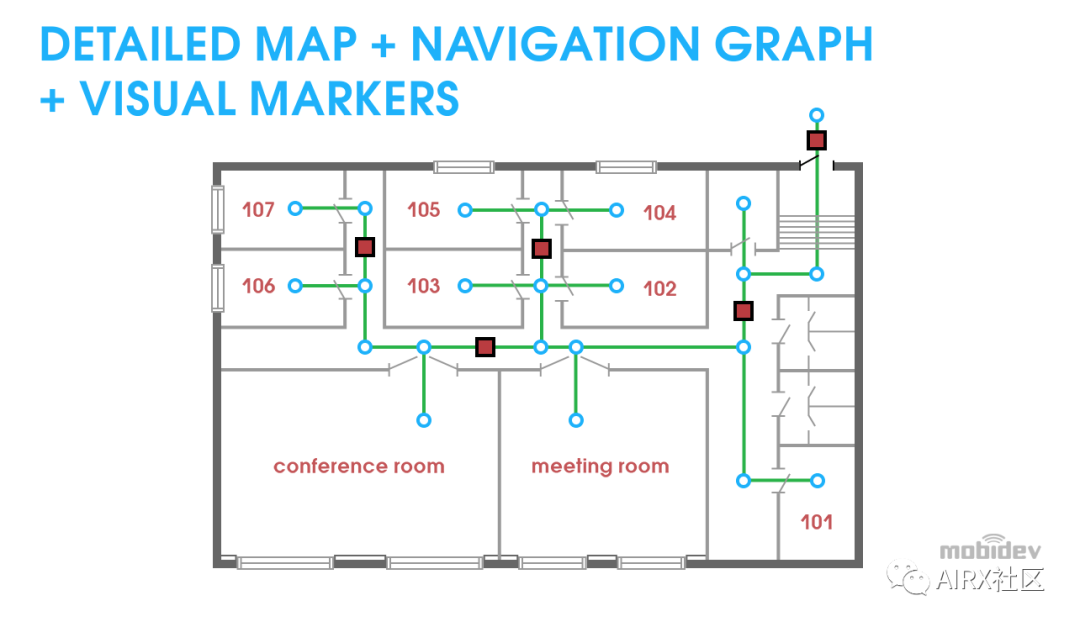
想法是将标记放置在平面图上,将其精确地转移到现实世界中,扫描标记,然后通过移动和旋转地图直到与现实世界完全匹配来对过程进行微调。最后一步是将更新后的精确标记位置保存到云中。
2、绘制室内导航路线
然后,我们使用图论构建路线,并根据坐标绘制折线或箭头(根据设计要求)。但是,使用增强现实在现实世界中绘制路线时会遇到一些挑战。事实是,AR内容始终放置在摄像机图像的顶部,从而产生了将数字内容放置在现实世界中的幻觉。如果绘制了整个路线,它将看起来很奇怪,直接穿过墙壁绘制。
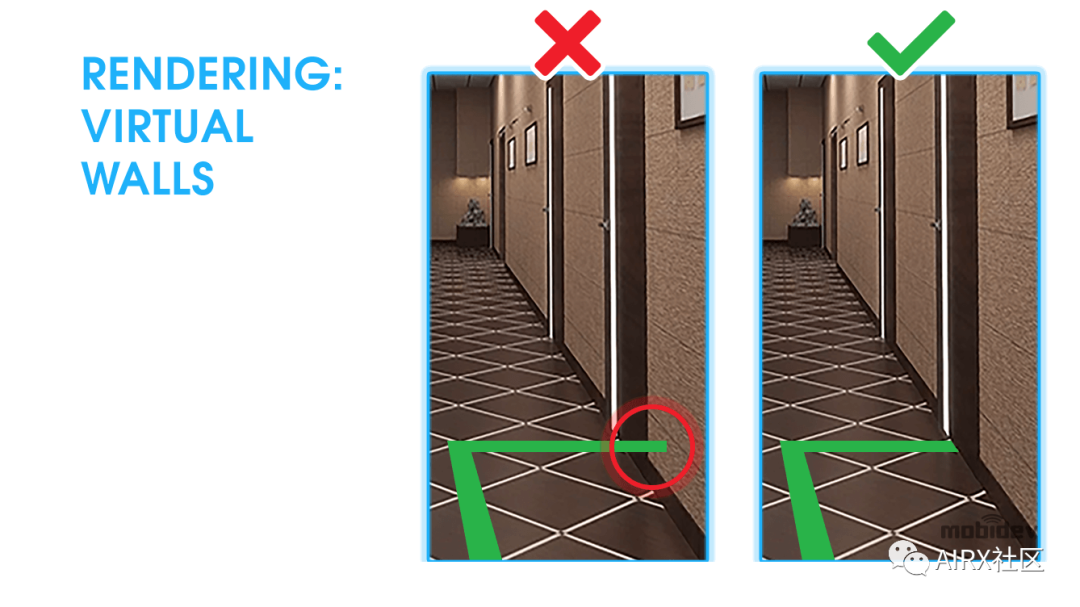
由于目标是使路线看起来更加自然,因此必须以某种方式遮挡路线的可见部分。这意味着必须在用户周围绘制路线,并沿半径逐渐消失。
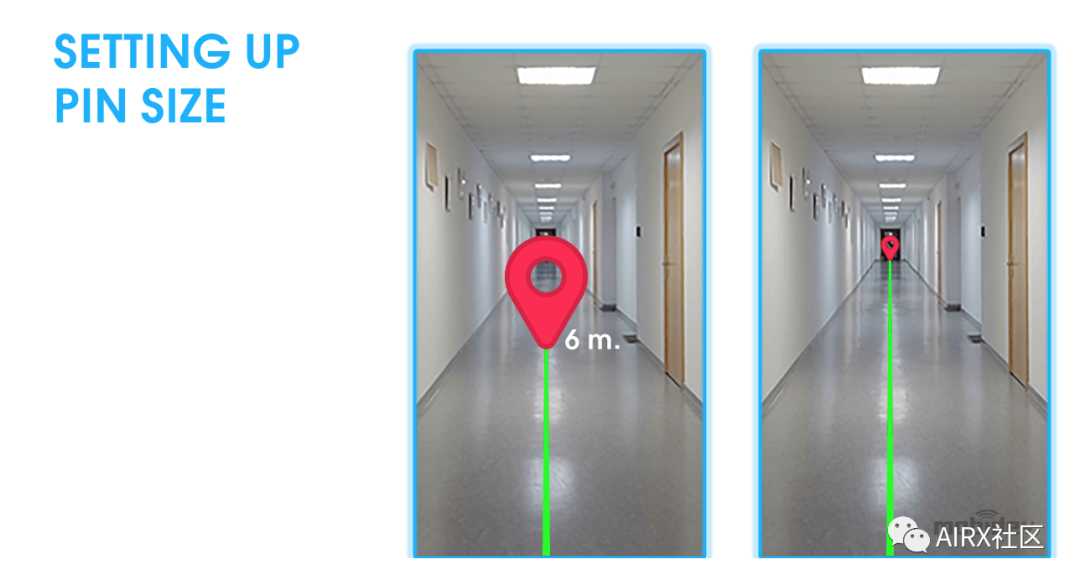
下一个需要解决的挑战是如何绘制相同大小的最终目标引脚,而不管其距离如何,以使其易于阅读标签和处理触摸。由于视角的原因,物体离相机越远,它们看起来越小。因此,必须将far针变大,但它们在屏幕上看起来都一样。
以下是需要考虑的视觉标记要求:
标记必须具有足够的视觉复杂性。图像上的细节越多,机器视觉就越容易识别它。
所有标记应具有不同的模式。
标记必须不对称,以便应用程序能够从哪一侧清楚地确定它们。
开发套件必须事先知道应跟踪的标记。
3、基于AR的室内定位的挑战
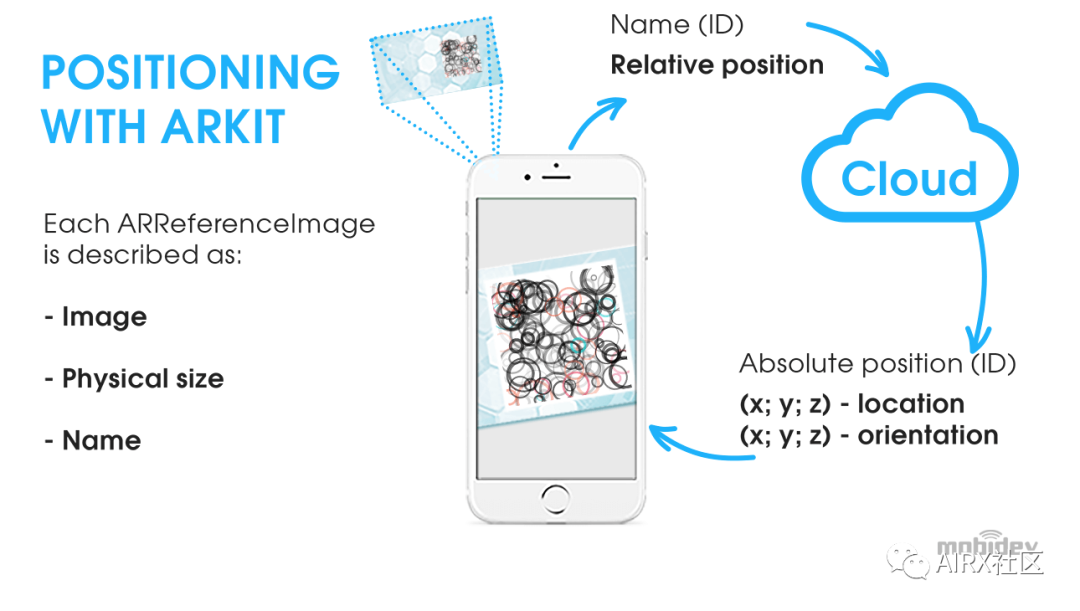
在AR驱动的室内定位系统获得主流认可之前,仍然需要解决一些挑战。首先,每个视觉标记或ARReferenceImage都有一个唯一的ID,该ID用于从云中获取有关标记在空间中位置的信息。
不可否认,越来越多的标记会降低性能,因为必须检查所有标记以找到匹配项。如果该应用程序是为需要10到20个视觉标记的小型建筑物而设计的,那就可以了。但是,如果需要在许多城市的连锁超市中设置导航功能,例如,使用成千上万的视觉标记,那么这将是一个挑战。
但是,通过使用GPS,可以更轻松地确定用户所处的建筑物,从而解决了这一难题。并且只能使用本地视觉标记。本质上,这就是可以根据需要添加尽可能多的地图的方式。云中可能有数百万个视觉标记,但附近仅需有限的一组。
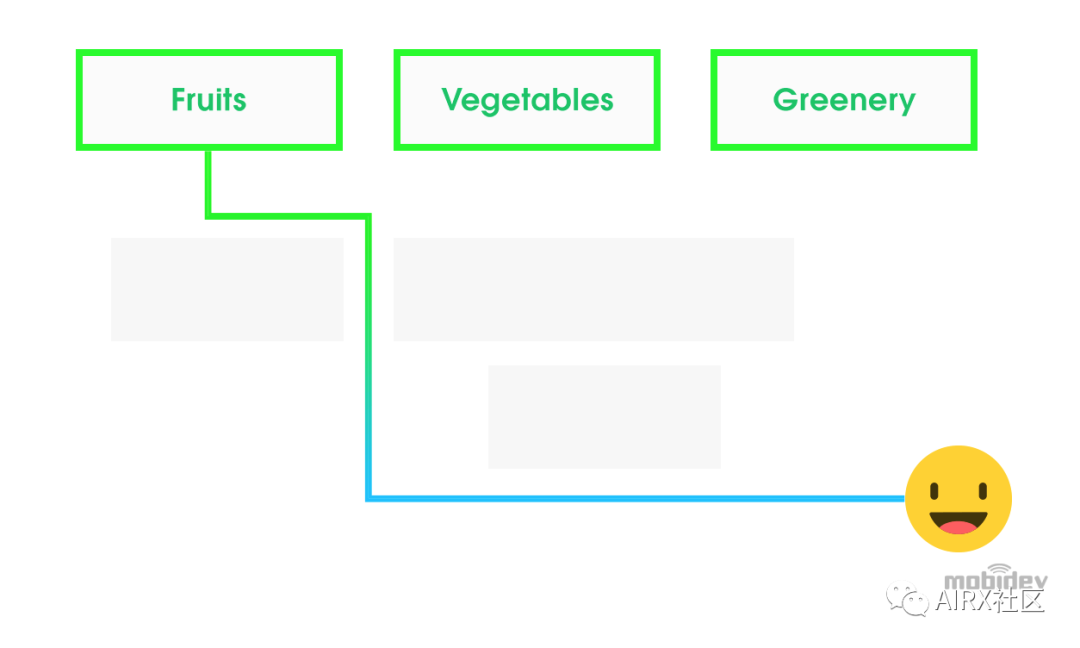
有趣的是,拥有动态更新的地图会为应用程序带来更大的灵活性。例如,我们为位于最左角的“Fruits”的一家超市创建了一个室内导航地图。如果该部分移动到了最右端的角落而不是Greenery部分,那么我们必须更新它在数据库中的当前位置并为其建立新的路线。
4、WI-FI RTT解决室内定位问题
第二个挑战是不间断会话的技术需求。为了获得正确的精度水平,用户应在扫描初始标记后直到到达终点为止,保持摄像机处于活动状态。可以通过利用诸如Wi-Fi RTT(往返行程时间)之类的精确定位新方法来解决此限制,Wi-Fi RTT(往返时间)是一种新兴技术,可以将移动设备定位在建筑物内,精度高达1米。
参考链接:
https://mobidev.biz/blog/augmented-reality-indoor-navigation-app-developement-arkit#nav5
从0到1学习SLAM,戳↓

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life




