CVPR2019 | 不同视角构造cycle-consistency,降低视频标注成本
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击文末“阅读原文”立刻申请入群~
作者 | Fisher Yu
本文转载自公众号SIGAI
导读:本文介绍的两篇文章从不同视角来构造cycle-consistency约束,目标都是为了在不需要标注label情况下,学到更好的视频representation,这也是解决在real-world中大规模无标注视频数据的低利用率及高昂的frame-level人工标注成本等问题。
两篇文章题目惊人的相似,但是切入点和潜在应用却完全不同:
《Temporal Cycle-Consistency Learning》[1],出自谷歌DeepMind,是上一篇《Time-Contrastive Networks: Self-Supervised Learning from Video》[2]的拓展升级版。在文中对于temporal alignment 任务,利用多个同类视频间的时间上下文的一致性来做frame matching,self-supervised 地学习多帧的embedding features。
《Learning Correspondence from the Cycle-consistency of Time》[3],出自CMU的Xiaolong等。对于一个视频内时间上下文的mid-level特征一致性来做patch matching,self-supervised 地学习单帧的embedding features。
这两篇文章都同时提到很多相同的关键词:self-supervised, corresponding, nearest neighbors, embeddings。
它们的主要相同点
1) 都设计了cycle-consistency的loss来进行自监督学习。
2) 都是先对每帧单独提取mid-level feature,然后再在deep space里进行matching。
它们的主要区别
1) 前者的cycle loss设计是基于多个视频间的,而后者是对于一个视频内部的
2) 由于前者对frame-level进行matching,帧global 与 global运算;而后者是local patch与global运算。
Temporal Cycle-Consistency Learning (TCC) [1],CVPR2019
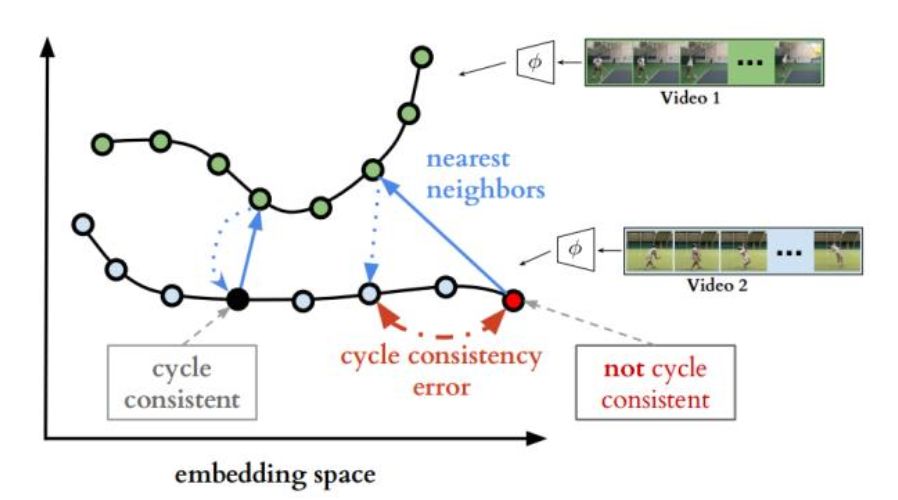
该文的目标是自学习embedding spaces,使得视频1和视频2尽量对齐。如下图所示,1) 首先对视频1和视频2若干帧映射到embedding spaces,左边的每个圆圈表示每帧的表征;2) 接着在视频1中寻找视频2当前帧(黑色和红色的圆圈)中的nearest neighbors(即实线蓝色箭头对应的两个绿色点);3) 最后cycle-back,用同样的方法寻找视频2中对应视频1两个绿色点nearest neighbors。这里产生的cycle consistency error就作为模型的Loss。
Cycle-consistent representation learning
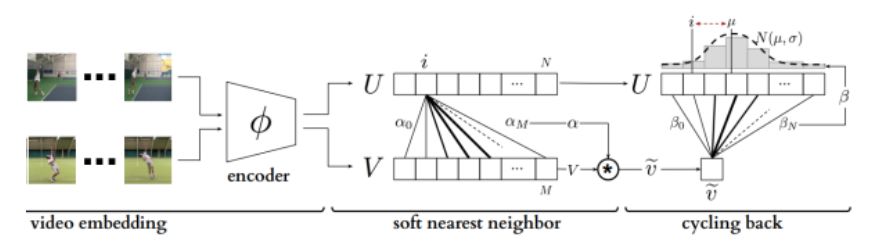
由于 cycle-consistency 的计算是不可微的,文中的主要贡献是设计了两种可微方法来实现 cycle-consistency,分别是Cycle-back 分类和Cycle-back 回归。
我们首先计算视频U中的ui在视频V的soft nearest neighbor
Temporal cycle consistency
Cycle-back 分类
把每一帧当成是一个类别,那么匹配nearest neighbor可看成是one-hot分类问题,即只有匹配帧为1,其他帧为0。逻辑单元直接由两者在embedding space的距离表示,这样从视频V中寻找当前ui的近邻可以表达成:

反过来,从视频U中寻找
Cycle-back 回归
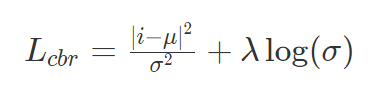
由于上述分类过程没有约束cycled back的时间点要离当前时间点的远近,而作者希望对离得近的时间点惩罚小,而离得远的时间点惩罚大,故在cycling back的过程加入了regression loss,即约束相似性分布为高斯分布,使得在当前时间点附近有Peak分布,而整体的variance尽量小,Loss表示为:
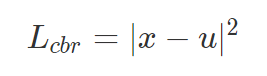
后面实验时也对比了MSE版本的Loss,即只考虑高斯分布中的均值,不考虑方差
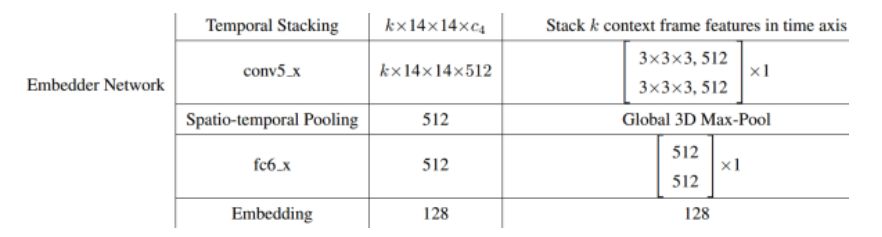
关于Encoder,使用的是VGG-M/ResNet50。而Embedding Network结构如下,加入3D卷积和3D池化,在补充材料中作者说到,即使在 k=2 情况下,性能也较好。
实验结果
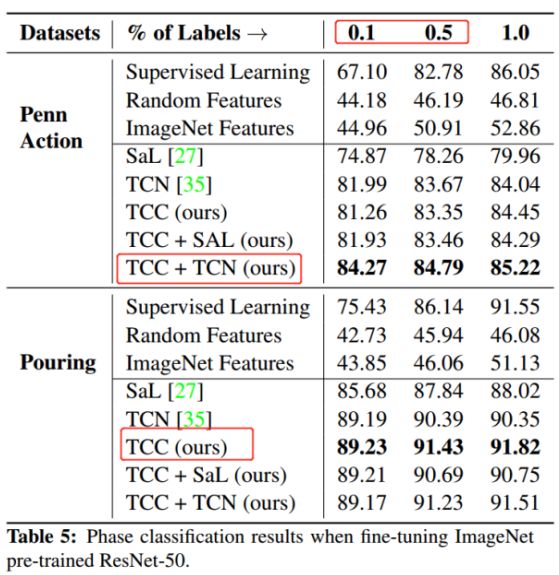
从下面实验结果图可见
1) 在仅仅有 0.1%和0.5%标注的label情况下,TCC性能远比Supervised learning的效果好,体现出 self-supervised learning在少样本学习下的优势.
2) TCC性能明显优于现有的两种无监督学习方法 SaL 和 TCN,当TCC+TCN结合时,在Penn Action下性能达到最大。
潜在应用
1.语音和视频跨模态迁移对齐
2.视频的细粒度检索,检索到内容对齐好的frame-level
3.视频异常检测
4.视频同步回放
具体可见
https://sites.google.com/view/temporal-cycle-consistency
Time-Contrastive Networks(TCN)[2],ICRA2018
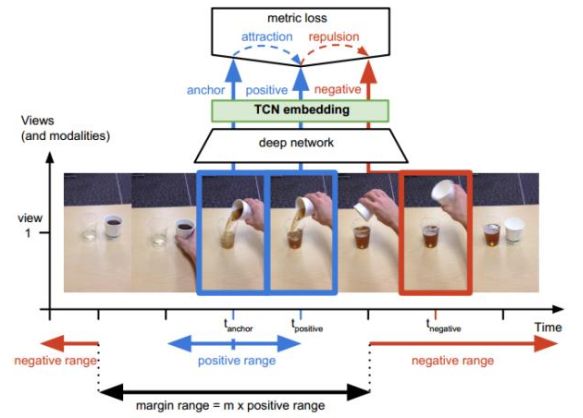
由于上面实验有对比TCN的结果,这里简单介绍下,都是同一个组的工作。主要思想在temporal上构造三元组,离anchor近的当成positive,离anchor远的当成negative。通过这个self-supervised learning,模型能学到强时间上下文的表达,尽管在空间上这些帧都是similar-looking images。
与TCC相比,TCN只有一个视频内部训练,难以学到多个视频的时间上下文关联,这也是在视频对齐中性能不如TCC的主要原因。
Single-view TCN
Learning Correspondence from the Cycle-consistency of Time[3],CVPR2019
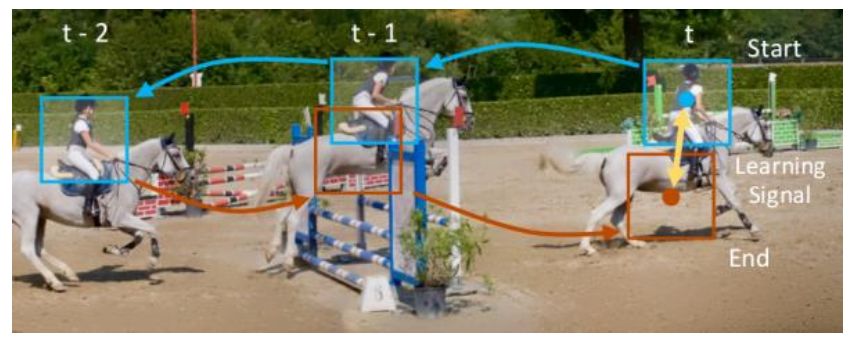
该文主要致力于统一光流和跟踪,通过自学习时空上的corresponding来得更好的embedding表征。如下图所示,主要贡献点有:1)构造了从t-->t-1-->t-2-->t-1-->t的time cycle,在不要手工标注label情况下,通过cycle前后的信息差异,来引导模型学习 ;2)对于上下文tracking,如t-->t-1,构造了可微分的tracking operation,使得网络能进行端到端地训练。
A Cycle in Time
首先我们来看可微分tracking operation
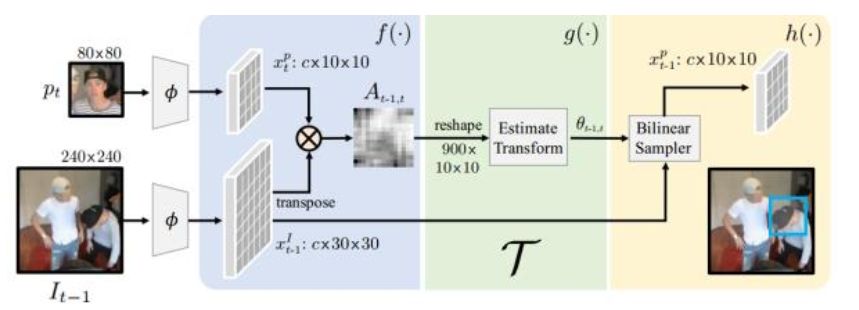
可微分tracking operation
网络的端到端训练是基于Backward-forward的iterative tracking后的模板匹配来实现的。如下图所示,在backward过程,从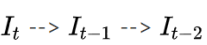
训练端到端Cycle-consistent
文中使用的 Loss 由三部分组成:Lsim 为每个tracking operation

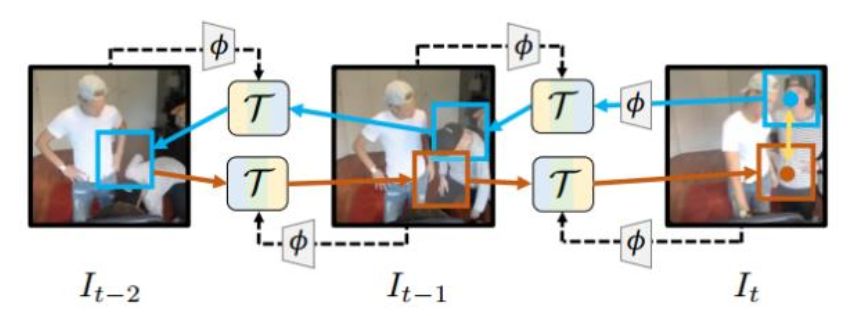
实验结果
性能远超当前的几种unsupervised methods,但相比fully supervised,仍需努力。
实例分割on DAVIS-2017
不同应用下可视化效果,在不需要人工label情况下,已经很棒棒哒:
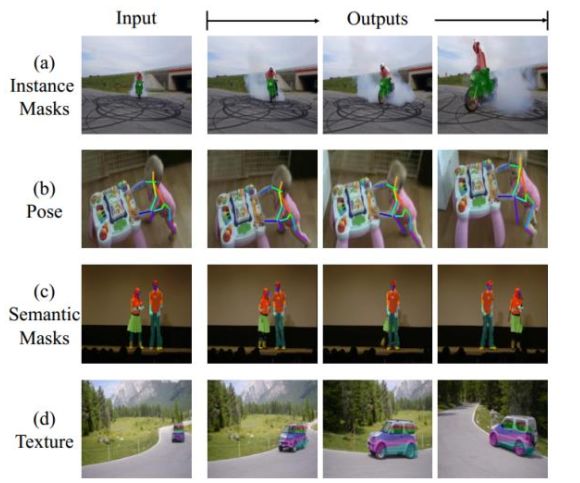
文中具体的应用如上图所示,在特定帧标定好target后(这里的target可以是mask, pose, texture 等等),在视频的后续帧进行propogation。
官方的代码链接:
https://github.com/xiaolonw/TimeCycle
总结与展望
两篇文章从不同视角来构造cycle-consistency约束,目标都是为了在不需要标注label情况下,学到更好的视频representation,这也是解决在real-world中大规模无标注视频数据的低利用率及高昂的frame-level人工标注成本等问题。正如作者在future work里谈到的,这两篇文章还是存在一定局限,比如[1]中的训练需要保证同一个视频内部尽量无重复的动作片段,以及两个视频的类别及内容必须有一定的相似性;[3]中在训练过程patch的选取是随机化的,可能包含多个物体,很容易导致网络学习歧异。
未来展望的话,必须把两篇文章的思想用起来,拓展到各种视频任务中;而对于两篇文章本身,双方的结合未尝不可,对于[1]中embedding特征是基于全局的,可参考[3]中类似思想,找到场景下带语义的object/patch来进行cycle交互,估计能理解得更好,对齐得更好。
Reference:
[1] Debidatta Dwibedi et al., Temporal Cycle-Consistency Learning, CVPR2019
[2] Pierre Sermanet et al., Time-Contrastive Networks: Self-Supervised Learning from Video, ICRA2018
[3] Xiaolong Wang et al. , Learning Correspondence from the Cycle-consistency of Time, CVPR2019
*延伸阅读
点击左下角“阅读原文”,即可申请加入极市目标跟踪、目标检测、工业检测、人脸方向、视觉竞赛等技术交流群,更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

觉得有用麻烦给个在看啦~




