赋能点云智能,武汉大学发布全球最大规模、多类型场景地面站扫描点云配准基准数据集(WHU-TLS)
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转载自:武大空间智能研究所
地面激光扫描系统(TLS)对地物表面的三维几何信息进行高速度、高密度、高精度地采集,获取三维点云,具有机动灵活、便于携带等优点,被广泛应用于城市发展跟踪、森林结构评估、滑坡监测、文化遗产保护、工业设施测量、犯罪现场调查等领域。点云配准(即将地面点云从各自的站心坐标系转换到场景统一坐标系)是上述应用的基础和前提。
TLS点云配准面临密度变化、视角差异、重叠度限制、重复和对称结构、数据海量、缺乏公开基准数据集等问题,且近年来,基于深度学习的方法已经成为计算机视觉领域中图像配准任务的基准方法,但是由于缺少大型数据集作基准,在3D点云配准领域,深度学习方法尚未给点云配准带来真正的变革。因此,课题组与慕尼黑工业大学、芬兰大地所、挪威科技大学、代尔夫特理工大学等相关大学的研究学者合作,对TLS点云配准的研究进行了深入综述与展望。研究成果Registration of Large-scale Terrestrial Laser Scanner Point Clouds: A Review and Benchmark被ISPRS Journal of Photogrammetry and Remote Sensing接收发表。该论文综述了TLS点云两两粗配准方法、TLS点云两两精配准方法、多视TLS点云配准方法以及现存点云配准基准数据集等四个方面的研究进展,分析了各类方法的特点和存在的不足,展望了未来发展的趋势。
为加快推进深度学习在3维点云处理领域的快速发展,赋能点云智能,课题组结合课题组近十年来的数据积累,联合慕尼黑工业大学、芬兰大地所、挪威科技大学、代尔夫特理工大学发布全球最大规模和最多样化场景类型的TLS点云配准基准数据集。本次公开的WHU-TLS基准数据集涵盖了地铁站、高铁站、山地、森林、公园、校园、住宅、河岸、文化遗产建筑、地下矿道、隧道等11种不同的环境,共包含115个测站、17.4亿个三维点以及点云之间的真实转换矩阵。此外,该基准数据集也为铁路安全运营、河流勘测和治理、森林结构评估、文化遗产保护、滑坡监测和地下资产管理等应用提供了典型有效数据。我们热忱欢迎相关科研工作者通过课题组网站:
http://3s.whu.edu.cn/ybs/en/benchmark.htm
下载使用WHU-TLS基准数据集。图1为WHU-TLS基准数据集示意图。我们后续也会陆续公开点云数据实例分割基准数据集、多平台激光点云融合数据集等,敬请持续关注。
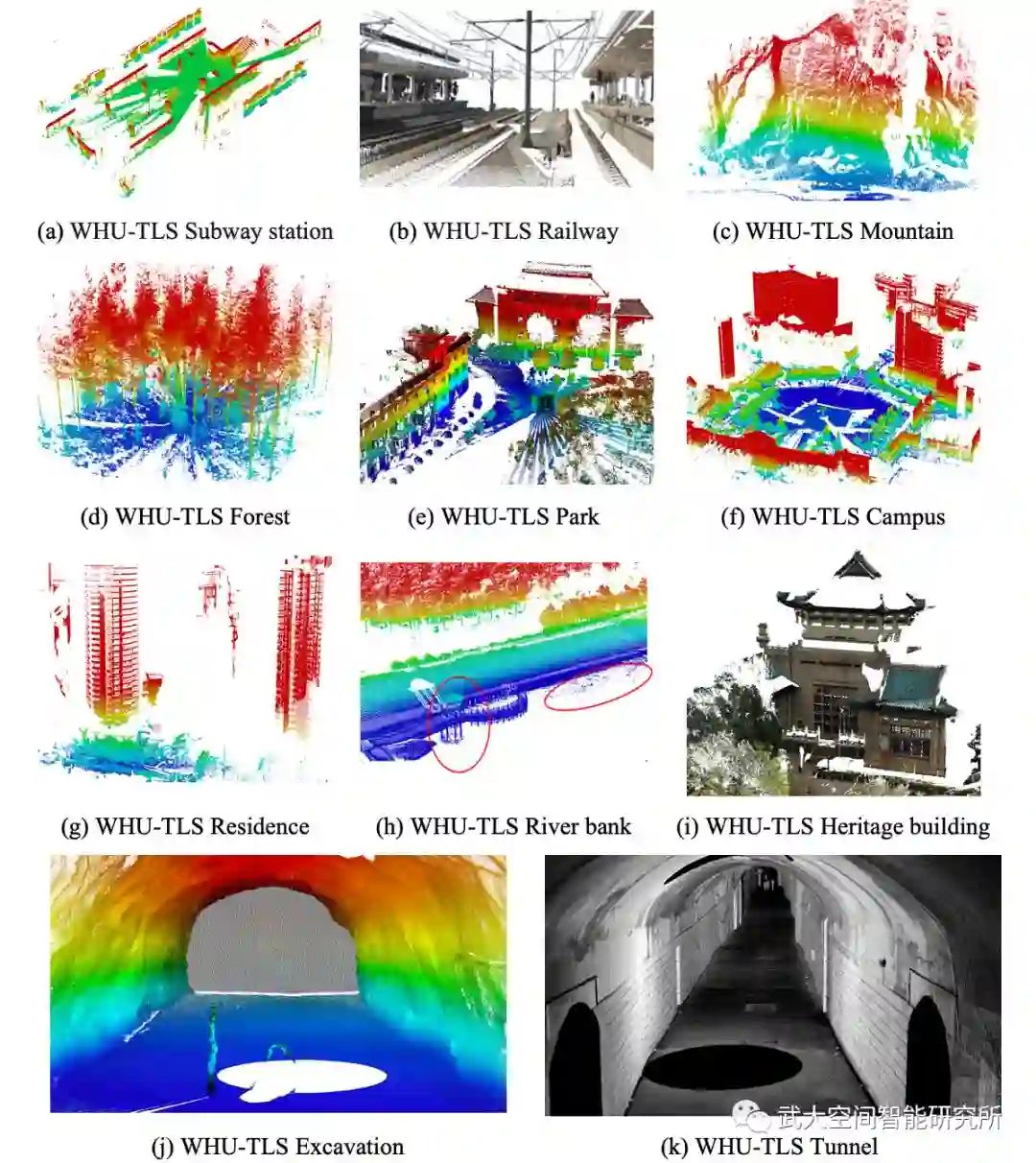
Fig. 1 WHU-TLS 基准数据集
相关论文:
Dong Z., YangB., Liu Y., Liang F., Li B., & Zang Y., 2017. A novel binary shape context for 3d local surface description. ISPRS J. Photogramm. Remote Sens. 130, 431-452.
Dong Z., Yang B., Liang F., Huang R., & Scherer S., 2018. Hierarchical registration of unordered TLS point clouds based on binary shape context descriptor. ISPRS J. Photogramm. Remote Sens. 144, 61-79.
Dong Z., Liang F., Yang B., Xu Y., Zang Y., Li J., Wang Y., Dai W., Fan H., Liang X., Stilla U., 2020. Registration of large-scale TLS Point Clouds: A Review and Benchmark. ISPRS J. Photogramm. Remote Sens. (In press)
重磅!CVer-学术微信交流群已成立
扫码添加CVer助手,可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、TensorFlow、PyTorch、图神经网络等群。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加群

▲长按关注我们
麻烦给我一个在看!




