PX4系统之固定翼飞控技术二次开发培训交流

目前无人飞行器技术的迅速发展,使得其广泛应用于物流,监测,航拍,农业等众多领域。各大无人飞行器公司产品不断推陈出新,各种新技术,新产品批量上市,技术迭代日新月异,乐趣无穷的背后是否也想一展身手。悟以往,阿木实验室举办的PX4平台多旋翼无人机技术培训班在各地举办,为个人飞行时代奠定了良好的开端。各级视频教程的开放,受到众多开发者的拥护,热诚的求知态度受到广大高校,企业的欢迎和好评。
旋翼飞行器的发展可谓突飞猛进,但固定翼特有的优势,却是旋翼望尘而莫及。固定翼在航程和运输能力上的突出,像顺丰,京东等接连发布的物流固定翼无人机,都预示着固定翼无人机将在物流等部分细分领域有着极大的推广与应用价值。
鉴于固定翼无人机在行业中的影响地位和应用潜力,阿木实验室特举办固定翼无人机飞控技术培训班。仍是PX4架构,但固定翼和多旋翼在控制和原理上却有本质的不同,位置控制和姿态控制差异显著。我们特别针对固定翼的特点来讲述该类型的无人机控制理论和方式方法。集思广益,展翅翱翔,一起收获知识和梦想。
【培训时间】
2018年8月25日-26日(周六-周日)
【培训地点】
北京(具体地址开课前微信群内通知)
【课程负责人】

【PX4固定翼技术培训咨询群】

【备注】本次课程可提供发票和培训证书
PX4固定翼课程大纲简介
1、基础部分
PIXHAWK系统概述:概述PX4源码组织架构,对PX4有整体感知,了解每个文件的作用。讲述系统从上电开始所执行的动作,如何由单片机的启动过渡到操作系统,过渡到应用程序,执行启动脚本。简述机型选择的背后触发了哪些操作,加深对系统的理解,铺垫二次开发。
进程机制uORB:uORB是PX4系统中进程间通信(IPC)的一种机制,在PX4系统掌管着系统中所有的信息流,通过实例教授大家如何使用uORB打通进程间通信。
固定翼整体框图:讲述固定翼编译设置和模型选择,熟悉固定翼主要功能模块,通过数据溯源的方式,实例讲解遥控器操纵杆的输入和地面站航线设置是如何进入飞控,以及如何经过各功能模块的判断、处理、传输、分发,反映到固定翼舵面和油门的变化,以构建对固定翼飞控程序的组成部分和相互关系的整体认知。
2、逻辑理解
功能模块整体介绍:高屋建瓴的介绍飞控整体数据流的执行过程,以及模块间的相互关系,对飞行控制有个系统的认识和整体的把握。
Commander决策分析:飞行模式的决策部分,结合源码学习模式切换的后退机制和故障保护策略,了解commander是如何影响姿态和位置的控制过程。
Mixer混控作用:简述mixer实现的相关文件,讲述Mixer的启动与脚本文件背后的解析过程,铺垫混控的修改舵机的设置以及如何定义新机型。
3、源码分析
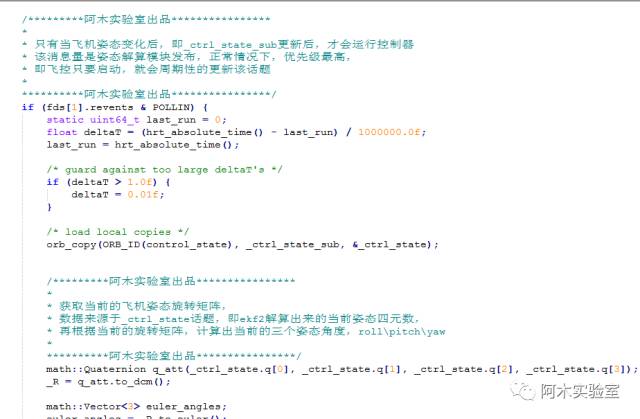
姿态控制:梳理PX4中固定翼姿态控制的实现过程,讲述手动或自动下姿态控制响应的不同,补充欧拉角速度和机体角速度之间的关系,解读中源码中偏航控制的两种方法以及协调转弯的实现过程,构建姿态控制过程明确手控注意事项。
位置控制:位置控制是PX4飞控从增稳控制到自动控制的关键,通过这个模块实现对飞机“飞多快、往哪飞、怎么飞”的控制。阐述源码中位置控制的实现过程,了解航点的类型和处理的不同,学习定速模式、定高模式和定点模式这三个位置控制模式的控制逻辑和程序实现。
MISSION模式:讲述固定翼位置控制源码中MISSION模式的具体实现,铺垫原理,讲述带有弹射起飞和滑跑起飞两种起飞方式的控制程序,讲述相对完善的自动降落的实现,拓展实际一键起飞中如何正确的设置航点。
4、算法理解
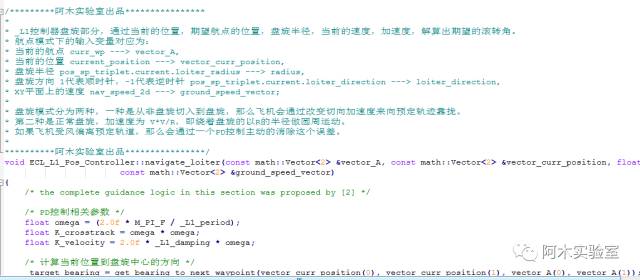
L1制导控制算法:PX4固定翼航向锁定的关键算法,一种非线性制导算法可以实现固定翼对目标的制导打击,对沿曲线路径有较好的跟踪性能。介绍这种控制律在航线跟踪和绕点盘旋这两个典型应用,并结合飞控程序理清本方法的各种参数的意义,以及调试方式。
TECS总能量控制算法:PX4固定翼纵向控制的关键算法,从能量角度协调飞机的高度和飞行速度,将速度控制与高度控制解耦。本节详解TECS的理论基础,对照理论进行PX4固定翼飞控中相应代码的解读。经过理论学习后,相应的调参问题将迎刃而解。
5、实践指导
创建新布局的固定翼模型:学习了PX4固定翼飞控的程序架构和各个关键模块,本节将实例讲解创建新型固定翼模型的过程。讲述模型配置、参数配置、舵面/mixer设置等主题内容,教学新型布局固定翼模型在飞控中的创建过程,学员将熟悉各种任意构型的固定翼飞机的创建和配置方式。
固定翼重点参数解释与调试技巧:梳理和总结整个固定翼程序中涉及的所有参数,同时介绍查找参数功能的数据溯源方法,也会对部分重点参数进行专题解释。学员熟悉参数的数据溯源之后,在之后的调试中不仅能够高效调试飞行,也能具有自主研究和探索参数配置的能力。
最后会介绍一种基于PX4的固定翼半物理仿真环境,讲述仿真环境的配置方法和调试方法。
对于核心代码我们都详细梳理了流程图和代码注解。阿木实验室我们做有价值的事情!可以说这是国内最详尽的代码注解和流程图还有涉及到的理论和公式,都在本次的培训中有所体现。