IoU、GIoU、DIoU、CIoU损失函数的那点事儿
加入极市专业CV交流群,与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度 等名校名企视觉开发者互动交流!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
一、IOU(Intersection over Union)
1. 特性(优点)
IoU就是我们所说的交并比,是目标检测中最常用的指标,在anchor-based的方法,https://zhuanlan.zhihu.com/p/62372897中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和ground-truth的距离。
-
可以说 它可以反映预测检测框与真实检测框的检测效果。 -
还有一个很好的特性就是 尺度不变性,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。 (满足非负性;同一性;对称性;三角不等性)
import numpy as npdef Iou(box1, box2, wh=False):if wh == False:xmin1, ymin1, xmax1, ymax1 = box1xmin2, ymin2, xmax2, ymax2 = box2else:xmin1, ymin1 = int(box1[0]-box1[2]/2.0), int(box1[1]-box1[3]/2.0)xmax1, ymax1 = int(box1[0]+box1[2]/2.0), int(box1[1]+box1[3]/2.0)xmin2, ymin2 = int(box2[0]-box2[2]/2.0), int(box2[1]-box2[3]/2.0)xmax2, ymax2 = int(box2[0]+box2[2]/2.0), int(box2[1]+box2[3]/2.0)xx1 = np.max([xmin1, xmin2])yy1 = np.max([ymin1, ymin2])xx2 = np.min([xmax1, xmax2])yy2 = np.min([ymax1, ymax2])area1 = (xmax1-xmin1) * (ymax1-ymin1)area2 = (xmax2-xmin2) * (ymax2-ymin2)inter_area = (np.max([0, xx2-xx1])) * (np.max([0, yy2-yy1]))iou = inter_area / (area1+area2-inter_area+1e-6)return iou
2. 作为损失函数会出现的问题(缺点)
-
如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小(重合度)。同时因为loss=0,没有梯度回传,无法进行学习训练。 -
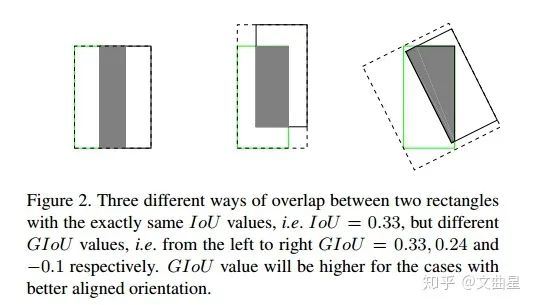
IoU无法精确的反映两者的重合度大小。如下图所示,三种情况IoU都相等,但看得出来他们的重合度是不一样的,左边的图回归的效果最好,右边的最差。
二、GIOU(Generalized Intersection over Union)
1、来源
在CVPR2019中,论文
《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》
https:arxiv.org/abs/1902.09630
的提出了GIoU的思想。由于IoU是比值的概念,对目标物体的scale是不敏感的。然而检测任务中的BBox的回归损失(MSE loss, l1-smooth loss等)优化和IoU优化不是完全等价的,而且 Ln 范数对物体的scale也比较敏感,IoU无法直接优化没有重叠的部分。
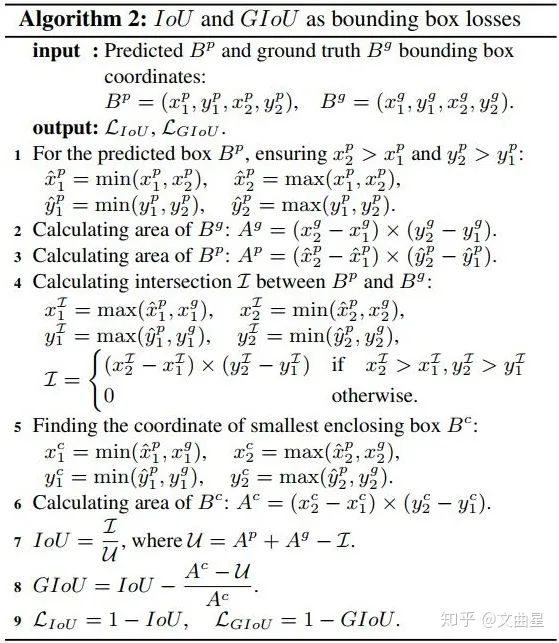
这篇论文提出可以直接把IoU设为回归的loss。
上面公式的意思是:先计算两个框的最小闭包区域面积_ _(通俗理解:同时包含了预测框和真实框的最小框的面积),再计算出IoU,再计算闭包区域中不属于两个框的区域占闭包区域的比重,最后用IoU减去这个比重得到GIoU。
附:
https://github.com/generalized-iou/g-darknet
2、 特性[1]
-
与IoU相似,GIoU也是一种距离度量,作为损失函数的话, ,满足损失函数的基本要求 -
GIoU对scale不敏感 -
GIoU是IoU的下界,在两个框无线重合的情况下,IoU=GIoU -
IoU取值[0,1],但GIoU有对称区间,取值范围[-1,1]。在两者重合的时候取最大值1,在两者无交集且无限远的时候取最小值-1,因此GIoU是一个非常好的距离度量指标。 -
与IoU只关注重叠区域不同, GIoU不仅关注重叠区域,还关注其他的非重合区域,能更好的反映两者的重合度。
def Giou(rec1,rec2):#分别是第一个矩形左右上下的坐标= rec1= rec2iou = Iou(rec1,rec2)area_C = (max(x1,x2,x3,x4)-min(x1,x2,x3,x4))*(max(y1,y2,y3,y4)-min(y1,y2,y3,y4))area_1 = (x2-x1)*(y1-y2)area_2 = (x4-x3)*(y3-y4)sum_area = area_1 + area_2w1 = x2 - x1 #第一个矩形的宽w2 = x4 - x3 #第二个矩形的宽h1 = y1 - y2h2 = y3 - y4W = min(x1,x2,x3,x4)+w1+w2-max(x1,x2,x3,x4) #交叉部分的宽H = min(y1,y2,y3,y4)+h1+h2-max(y1,y2,y3,y4) #交叉部分的高Area = W*H #交叉的面积add_area = sum_area - Area #两矩形并集的面积end_area = (area_C - add_area)/area_C #闭包区域中不属于两个框的区域占闭包区域的比重giou = iou - end_areareturn giou
三、DIoU(Distance-IoU)[2]
1、来源
DIoU要比GIou更加符合目标框回归的机制,将目标与anchor之间的距离,重叠率以及尺度都考虑进去,使得目标框回归变得更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。论文中
Distance-IoU
https://arxiv.org/pdf/1911.08287.pdf
基于IoU和GIoU存在的问题,作者提出了两个问题:
1. 直接最小化anchor框与目标框之间的归一化距离是否可行,以达到更快的收敛速度?
2. 如何使回归在与目标框有重叠甚至包含时更准确、更快?
其中, , 分别代表了预测框和真实框的中心点,且 代表的是计算两个中心点间的欧式距离。 代表的是能够同时包含预测框和真实框的最小闭包区域的对角线距离。
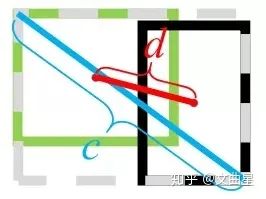
DIoU中对anchor框和目标框之间的归一化距离进行了建模
附:
YOLOV3 DIoU GitHub项目地址
https//github.com/Zzh-tju/DIoU-darknet
2、优点
-
与GIoU loss类似,DIoU loss( )在与目标框不重叠时,仍然可以为边界框提供移动方向。 -
DIoU loss可以直接最小化两个目标框的距离,因此比GIoU loss收敛快得多。 -
对于包含两个框在水平方向和垂直方向上这种情况,DIoU损失可以使回归非常快,而GIoU损失几乎退化为IoU损失。 -
DIoU还可以替换普通的IoU评价策略,应用于NMS中,使得NMS得到的结果更加合理和有效。
实现代码:[3]
def Diou(bboxes1, bboxes2):rows = bboxes1.shape[0]cols = bboxes2.shape[0]dious = torch.zeros((rows, cols))if rows * cols == 0:#return diousexchange = Falseif bboxes1.shape[0] > bboxes2.shape[0]:bboxes2 = bboxes2, bboxes1dious = torch.zeros((cols, rows))exchange = True# #xmin,ymin,xmax,ymax->[:,0],[:,1],[:,2],[:,3]w1 = bboxes1[:, 2] - bboxes1[:, 0]h1 = bboxes1[:, 3] - bboxes1[:, 1]w2 = bboxes2[:, 2] - bboxes2[:, 0]h2 = bboxes2[:, 3] - bboxes2[:, 1]area1 = w1 * h1area2 = w2 * h2center_x1 = (bboxes1[:, 2] + bboxes1[:, 0]) / 2center_y1 = (bboxes1[:, 3] + bboxes1[:, 1]) / 2center_x2 = (bboxes2[:, 2] + bboxes2[:, 0]) / 2center_y2 = (bboxes2[:, 3] + bboxes2[:, 1]) / 2inter_max_xy = torch.min(bboxes1[:, 2:],bboxes2[:, 2:])inter_min_xy = torch.max(bboxes1[:, :2],bboxes2[:, :2])out_max_xy = torch.max(bboxes1[:, 2:],bboxes2[:, 2:])out_min_xy = torch.min(bboxes1[:, :2],bboxes2[:, :2])inter = torch.clamp((inter_max_xy - inter_min_xy), min=0)inter_area = inter[:, 0] * inter[:, 1]inter_diag = (center_x2 - center_x1)**2 + (center_y2 - center_y1)**2outer = torch.clamp((out_max_xy - out_min_xy), min=0)outer_diag = (outer[:, 0] ** 2) + (outer[:, 1] ** 2)union = area1+area2-inter_areadious = inter_area / union - (inter_diag) / outer_diagdious = torch.clamp(dious,min=-1.0,max = 1.0)if exchange:dious = dious.Treturn dious
四、CIoU(Complete-IoU)
论文考虑到bbox回归三要素中的长宽比还没被考虑到计算中,因此,进一步在DIoU的基础上提出了CIoU。其惩罚项如下面公式:
其中 是权重函数,
而 用来度量长宽比的相似性,定义为
完整的 CIoU 损失函数定义:
最后,CIoU loss的梯度类似于DIoU loss,但还要考虑 的梯度。在长宽在 的情况下, 的值通常很小,会导致梯度爆炸,因此在 实现时将替换成1。[4]
实现代码:[5]
def bbox_overlaps_ciou(bboxes1, bboxes2):rows = bboxes1.shape[0]cols = bboxes2.shape[0]cious = torch.zeros((rows, cols))if rows * cols == 0:return ciousexchange = Falseif bboxes1.shape[0] > bboxes2.shape[0]:bboxes2 = bboxes2, bboxes1cious = torch.zeros((cols, rows))exchange = Truew1 = bboxes1[:, 2] - bboxes1[:, 0]h1 = bboxes1[:, 3] - bboxes1[:, 1]w2 = bboxes2[:, 2] - bboxes2[:, 0]h2 = bboxes2[:, 3] - bboxes2[:, 1]area1 = w1 * h1area2 = w2 * h2center_x1 = (bboxes1[:, 2] + bboxes1[:, 0]) / 2center_y1 = (bboxes1[:, 3] + bboxes1[:, 1]) / 2center_x2 = (bboxes2[:, 2] + bboxes2[:, 0]) / 2center_y2 = (bboxes2[:, 3] + bboxes2[:, 1]) / 2inter_max_xy = torch.min(bboxes1[:, 2:],bboxes2[:, 2:])inter_min_xy = torch.max(bboxes1[:, :2],bboxes2[:, :2])out_max_xy = torch.max(bboxes1[:, 2:],bboxes2[:, 2:])out_min_xy = torch.min(bboxes1[:, :2],bboxes2[:, :2])inter = torch.clamp((inter_max_xy - inter_min_xy), min=0)inter_area = inter[:, 0] * inter[:, 1]inter_diag = (center_x2 - center_x1)**2 + (center_y2 - center_y1)**2outer = torch.clamp((out_max_xy - out_min_xy), min=0)outer_diag = (outer[:, 0] ** 2) + (outer[:, 1] ** 2)union = area1+area2-inter_areau = (inter_diag) / outer_diagiou = inter_area / unionwith torch.no_grad():arctan = torch.atan(w2 / h2) - torch.atan(w1 / h1)v = (4 / (math.pi ** 2)) * torch.pow((torch.atan(w2 / h2) - torch.atan(w1 / h1)), 2)S = 1 - ioualpha = v / (S + v)w_temp = 2 * w1ar = (8 / (math.pi ** 2)) * arctan * ((w1 - w_temp) * h1)cious = iou - (u + alpha * ar)cious = torch.clamp(cious,min=-1.0,max = 1.0)if exchange:cious = cious.Treturn cious
五、损失函数在YOLOv3上的性能(论文效果)
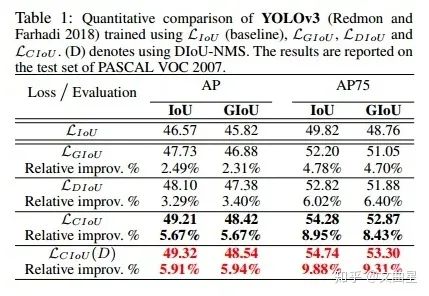
目标检测算法之AAAI 2020 DIoU Loss 已开源(YOLOV3涨近3个点)
https://cloud.tencent.com/developer/article/1558533
推荐文章:
CrazyVertigo:目标检测回归损失函数简介:SmoothL1/IoU/GIoU/DIoU/CIoU Loss
参考
-
https://zhuanlan.zhihu.com/p/57863810 -
DIoU参考 https://mp.weixin.qq.com/s/7E2xG1LUQZGWvUee1llmsA -
DIOU代码实现 https://blog.csdn.net/TJMtaotao/article/details/103317267 -
AAAI 2020 | DIoU 和 CIoU:IoU 在目标检测中的正确打开方式 https://bbs.cvmart.net/articles/1396 -
https://blog.csdn.net/TJMtaotao/article/details/103317267

添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:AI移动应用-小极-北大-深圳),即可申请加入AI移动应用极市技术交流群,更有每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、行业技术交流,一起来让思想之光照的更远吧~

△长按添加极市小助手

△长按关注极市平台,获取最新CV干货
觉得有用麻烦给个在看啦~


