【机器人】机器人示教编程和离线编程技术解读,这次全了!
协作机器人示教编程
需要实际机器人系统和工作环境
编程时机器人停止工作
在实际系统上试验程序
编程的质量取决于编程者的经验
难以实现复杂的机器人运行轨迹
机器人离线编程
离线编程特点:
需要机器人系统和工作环境的图形模型
编程时不影响机器人工作
通过仿真试验程序
可用CAD方法进行最佳轨迹规划
可实现复杂运行轨迹的编程
1.离线编程优点

2. 离线编程系统构成
一般说来,机器人离线编程系统包括以下一些主要模块:传感器、机器人系统CAD建模、离线编程、图形仿真、人机界面以及后置处理等。如图所示:

3. 离线编程关键技术
机器人离线编程系统正朝着集成的方向前进,其中包含了多个领域中的多个学科,为推动这项技术的进一步发展,以下几个方面的技术是关键:

多传感器融合技术的建模与仿真。随着机器人智能化的提高,传感器技术在机器人系统中的应用越来越重要。因而需要在离线编程系统中对多传感器进行建模,实现多传感器的通讯,执行基于多传感器的操作。
错误检测和修复技术。系统执行过程中发生错误是难免的,应对系统的运行状态进行检测以监视错误的发生,并采用相应的修复技术。
各种规划算法的进一步研究,其包括路径规划、放置规划和微动规划等。规划一方面要考虑到环境的复杂性、连续性和不确定性,另一方面又要充分注意计算的复杂性。
通用有效的误差标定技术,以应用于各种实际应用场合的机器人的标定。
-
具体应用的工艺支持。如弧焊,作为离线编程应用比较困难的领域,不止是姿态、轨迹的问题,而且需要更多的工艺方面的研究以及相应的专家系统。
4. 离线编程误差
第一种是外部误差,包括机器人和工装的安装误差,工装的加工误差等。
第二种是内部误差,即机器人本体在加工制造时产生的误差。
减小误差方式:
安装误差校准
Motocalv进行安装误差校准的原理是在仿真软件中工件的三个特征位置生成一个三点程序,然后在现场工件上同样三个位置生成一个三点程序,程序点顺序和软件中相同。通过这两个程序、机器人系统参数和工具尖端点数据,可计算得到现场和软件中工件与机器人相对位置差值。用这个差值去补偿离线程序,缩小偏差。
这种方法需要到现场示教校准程序,遁入电脑,计算误差,补偿离线程序之后再遁入机器人,操作步骤较多,比较麻烦
用户坐标系校准法

5.离线编程软件应用领域









6.离线编程主流厂商


7.机器人编程趋势
随着视觉技术、传感技术,智能控制,网络和信息技术以及大数据等技术的发展,未来的机器人编程技术将会发生根本的变革,主要表现在以下几个方面:
①编程将会变得简单、快速、可视、模拟和仿真立等可见。
②基于视觉、传感,信息和大数据技术,感知、辨识、重构环境和工件等的CAD模型,自动获取加工路径的几何信息。
③基于互联网技术实现编程的网络化、远程化、可视化。
④基于增强现实技术实现离线编程和真实场景的互动。
⑤根据离线编程技术和现场获取的几何信息自主规划加工路径、焊接参数并进行仿真确认。
总之,在不远的将来,传统的在线示教编程将只在很少的场合得到应用,比如空间探索、水下、核电等,而离线编程技术将会得到进一步发展,并与CAD/CAM、视觉技术、传感技术,互联网、大数据、增强现实等技术深度融合,自动感知、辨识和重构工件和加工路径等,实现路径的自主规划,自动纠偏和自适应环境。
▣ 来源:数字化企业,版权归原作者所有,如有侵权,请联系删除,谢谢!

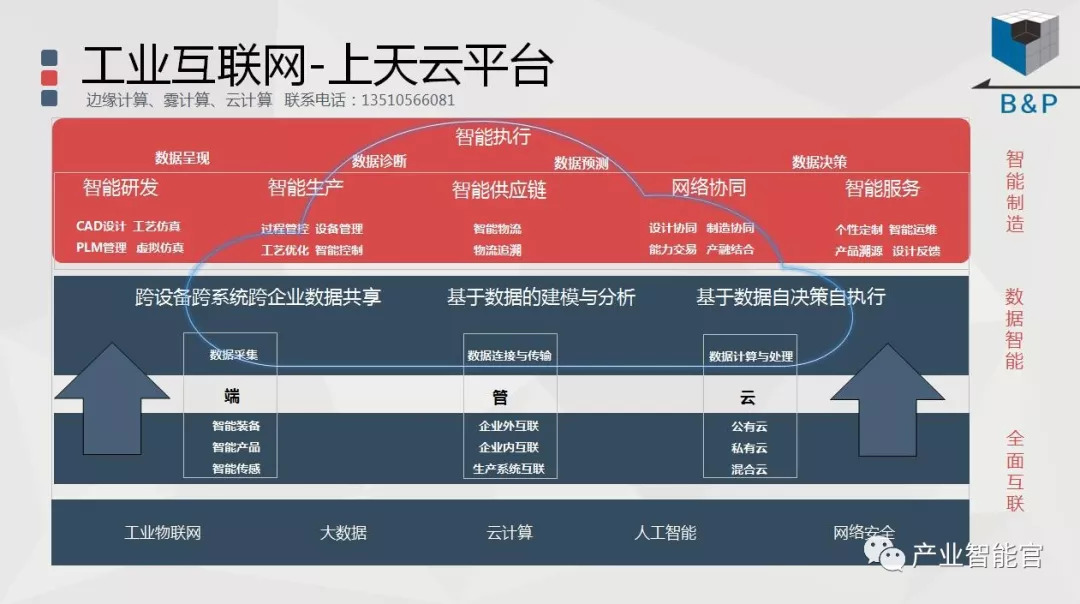
工业互联网
产业智能官 AI-CPS
加入知识星球“产业智能研究院”:先进产业OT(工艺+自动化+机器人+新能源+精益)技术和新一代信息IT技术(云计算+大数据+物联网+区块链+人工智能)深度融合,在场景中构建状态感知-实时分析-自主决策-精准执行-学习提升的机器智能认知计算系统;实现产业转型升级、DT驱动业务、价值创新创造的产业互联生态链。

版权声明:产业智能官(ID:AI-CPS)推荐的文章,除非确实无法确认,我们都会注明作者和来源,涉权烦请联系协商解决,联系、投稿邮箱:erp_vip@hotmail.com。