本文介绍轻舟智航提出的用于自动驾驶的运动预测新方法:Path-Aware Graph Attention for HD Maps in Motion Prediction。该方法获得了 CVPR 2021 Workshop on Autonomous Driving 的 Argoverse 运动预测挑战赛(Argoverse Motion Forecasting Competition)的冠军。在此次比赛中,轻舟智航 Blue Team 从国内外自动驾驶领域几十支团队(包括 Waymo、华为、阿里巴巴、深动科技、海康威视等)中脱颖而出,在本次比赛的决胜关键指标 brier-minFDE 上取得显著优势,斩获冠军。相关论文刚刚被 ICRA 2022 接收。
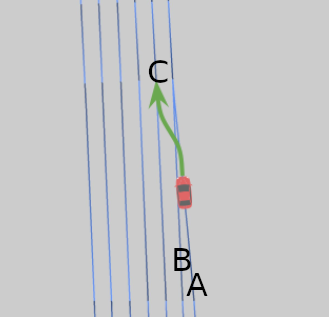
下图所示是一个车道合并的场景。A 和 B 表示并线的两个车道,其中 A 是车辆当前所在车道。对于车辆向左并线的情况,不光要考虑 A 和它的一阶近邻 B 的关系,还需要考虑它和二阶近邻 C 的关系,也即邻居的邻居。建模高阶连接对基于图表示的地图编码来说是一个具有挑战的问题。一种简单的处理是采用递归的方法,比如,先考虑 A 和 B 和交互,然后考虑 B 和 C 的交互,进而推导 A 和 C 的交互。然而真实场景中,我们换道到 C 并不是采用这种递归的方式。我们通常会忽略 B 的影响,而将更多的注意力集中在 C 上。
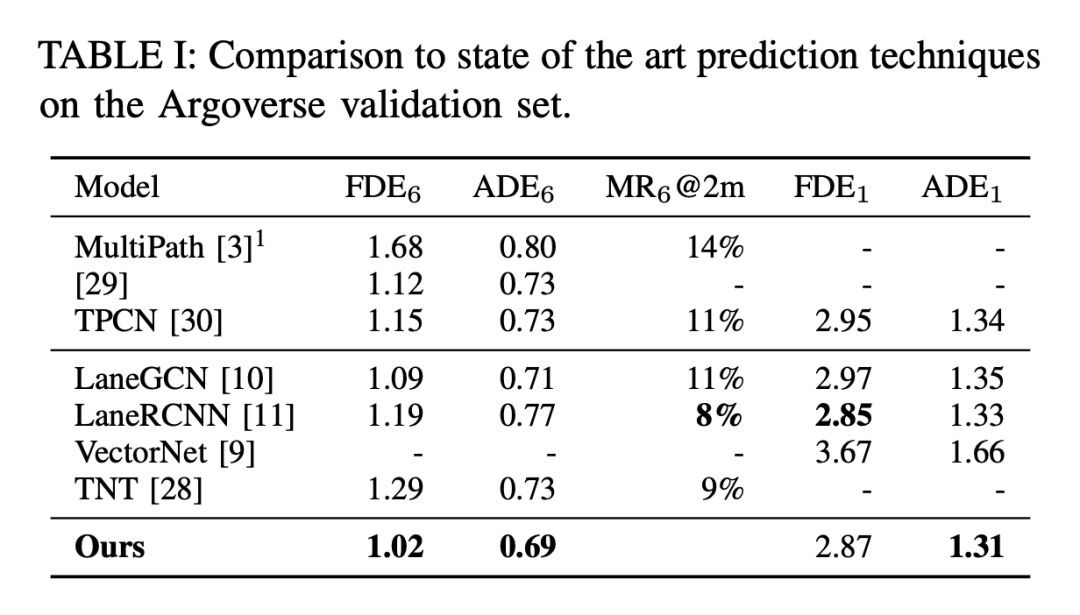
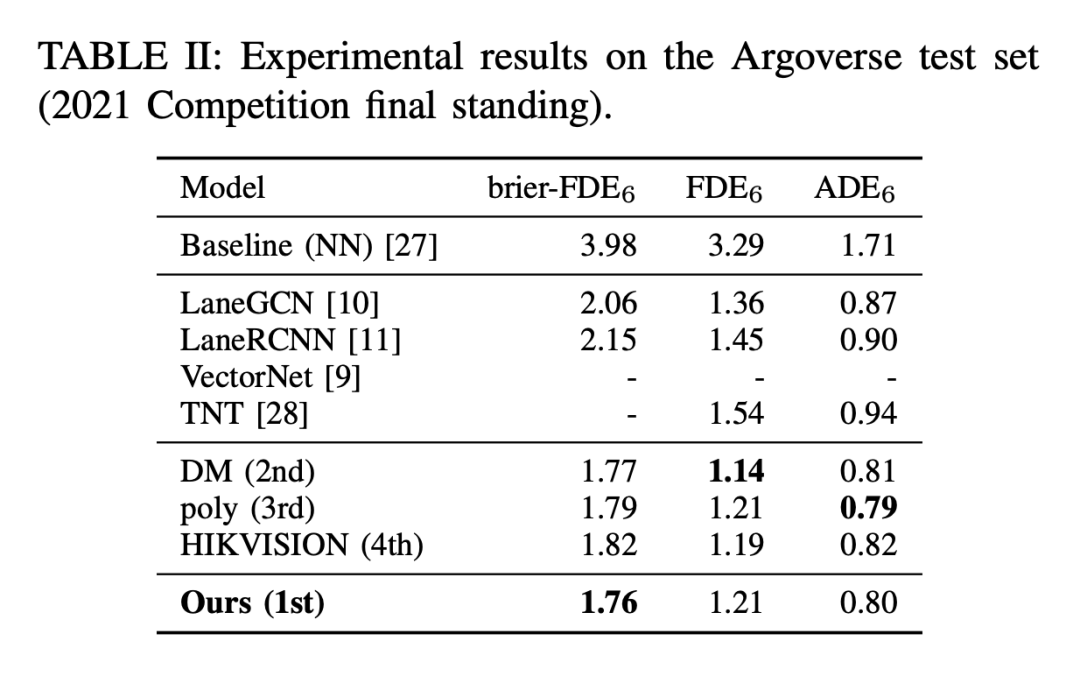
TABLE I 所示是提出的方法与一些最先进的方法的性能对比。其中下半部分对比的是基于向量表示的高精地图的方法。TABLE II 所示是 2021 Argoverse 运动预测挑战赛的结果对比。比赛最终排名以 Brier minimum Final Displacement Error (brier-minFDE) 为准。
[1] M.-F. Chang, J. Lambert, P. Sangkloy, J. Singh, S. Bak, A. Hartnett, D. Wang, P. Carr, S. Lucey, D. Ramanan, and J. Hays, “Argoverse: 3d tracking and forecasting with rich maps,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2019. [2] M. Liang, B. Yang, R. Hu, Y. Chen, R. Liao, S. Feng, and R. Urtasun, “Learning lane graph representations for motion forecasting,” in European Conference on Computer Vision, pp. 541–556, Springer, 2020. [3] Y. Chai, B. Sapp, M. Bansal, and D. Anguelov, “Multipath: Multiple probabilistic anchor trajectory hypotheses for behavior prediction,” arXiv preprint arXiv:1910.05449, 2019. [4] T. Phan-Minh, E. C. Grigore, F. A. Boulton, O. Beijbom, and E. M. Wolff, “Covernet: Multimodal behavior prediction using trajectory sets,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 14074–14083, 2020. [5] J. Gao, C. Sun, H. Zhao, Y. Shen, D. Anguelov, C. Li, and C. Schmid, “Vectornet: Encoding hd maps and agent dynamics from vectorized representation,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 11525–11533, 2020. [6] W. L. Hamilton, R. Ying, and J. Leskovec, “Inductive representation learning on large graphs,” arXiv preprint arXiv:1706.02216, 2017. [7] T. N. Kipf and M. Welling, “Semi-supervised classification with graph convolutional networks,” arXiv preprint arXiv:1609.02907, 2016. [8] P. Velickovi ˇ c, G. Cucurull, A. Casanova, A. Romero, P. Lio, and Y. Bengio, “Graph attention networks,” arXiv preprint arXiv:1710.10903, 2017. 轻舟智航 QCraft 火热招聘中