CVPR 2020 | 用于点云中3D对象检测的图神经网络

论文地址:https://www.aminer.cn/pub/5e5f7c4791e011df604ecb9c
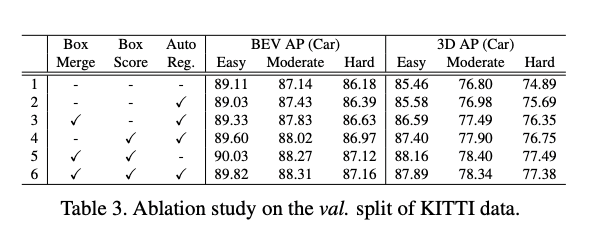
本文提出了一个 GNN 用于从 LiDAR 电云中发现对象,为此,作者在固定半径的近邻图中有效地编码了点云,使用 Point-GNN 预测每个点的对象的类别和形状。在 Point-GNN 中,本文提出了一种自动注册机制来减少平移差异,并且设计了一种盒合并和计分操作,以准确地组合来自多个顶点的检测。在KITTI基准上进行的实验表明,本文所提出的方法仅使用点云即可达到领先的准确性,甚至可以超越基于融合的算法,结果证明了使用图神经网络作为 3D 对象检测的新方法的潜力。
理解 3D 环境对于机器人感知十分重要,从点云中识别物体对于如自动驾驶之类的应用很有帮助。
CNN 依赖卷积操作识别物体,卷积操作虽然有效,但需要网格化的输入,但点云相较于图片来说更加稀疏并且在网格中分布不均。将点云放置在常规网格上会在网格单元中生成数量不均匀的点。在这样的网格上应用相同的卷积运算会导致拥挤的单元中潜在的信息丢失或空单元中的计算浪费。
最近的一些工作尝试使用无序点集作为输入,这样无需将点云转换为网格。但这样做通常需要迭代采样和分组来创建点集。在大的点云上重复分组和采样可能会在计算上造成高昂的成本,因此最近的一些 3D 检测方法通常采用混合的方法在不同阶段分别使用网格或集合表示,但这种混合的策略可能会同时受到这两种表示方法的限制。

本文的主要贡献有以下几个方面:
1. 提出了一种使用 GNN 的点云物体检测方法;
2. 使用带有自动注册机制的 Point-GNN 实现一次检测多个物体;
3. 在 KITTI benchmark 上达到了 SOTA 的 3D 对象检测精确度,并深入分析了每个组件的有效性。
模型的整体结构如下图所示,分为三个组件:1)图构建;2)T次迭代的GNN;3)边界框合并和评分。

图构建

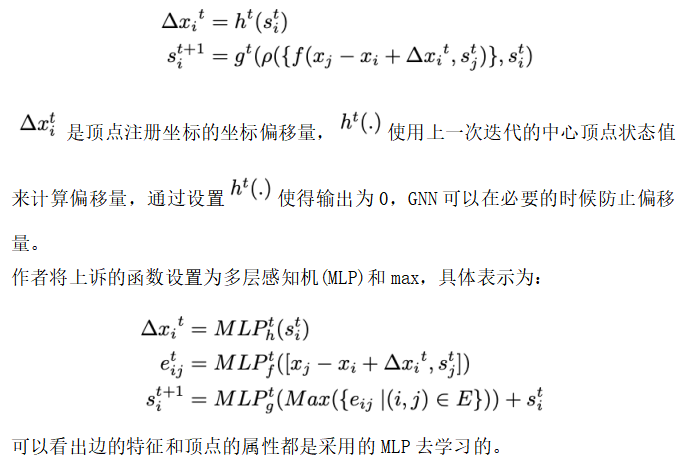
带自注册机制的GNN



更多 CVPR 2020 论文请访问:https://www.aminer.cn/conf/cvpr2020

想要了解更多学术进展、前沿科技资讯,参与学术头条每日话题讨论,可以扫描二维码或搜索AMiner308添加学术君微信,对学术君说: “我想进读者群”, 即可进入读者群,不定期发福利~



登录查看更多
相关内容

Arxiv
5+阅读 · 2019年5月16日
Arxiv
4+阅读 · 2019年1月4日
Arxiv
8+阅读 · 2018年2月21日
Arxiv
3+阅读 · 2017年12月28日



相关VIP内容
相关资讯
相关论文
Arxiv
5+阅读 · 2019年5月16日
Arxiv
4+阅读 · 2019年1月4日
Arxiv
8+阅读 · 2018年2月21日
Arxiv
3+阅读 · 2017年12月28日