开源 | Deep SESR 搞定水下机器人视觉增强与超分辨率
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
论文地址:
http://arxiv.org/pdf/2002.01155v1.pdf
代码:https://github.com/xahidbuffon/deep-sesr.
来源:明尼苏达大学
论文名称:Simultaneous Enhancement and Super-Resolution of Underwater Imageryfor Improved Visual Perception
原文作者:Md Jahidul Islam
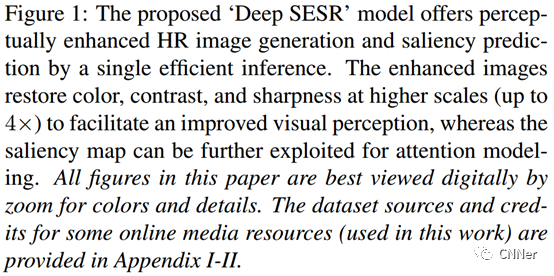
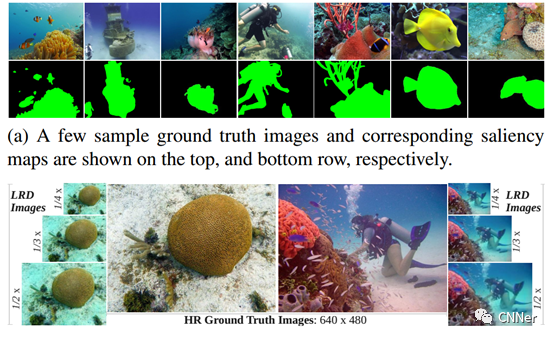
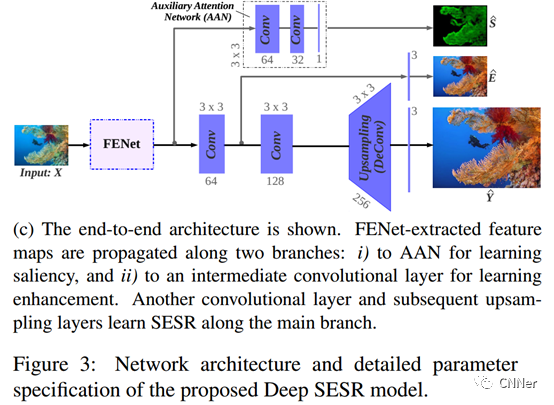
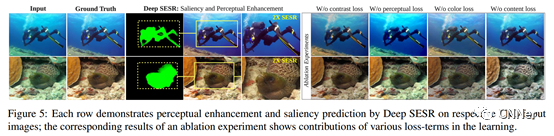
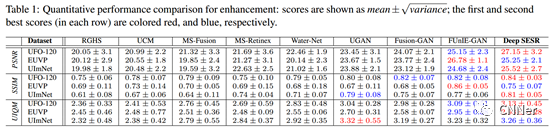
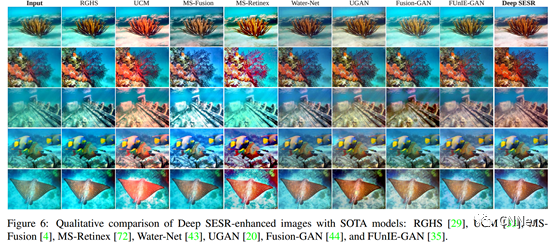
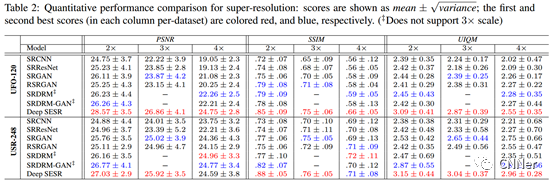
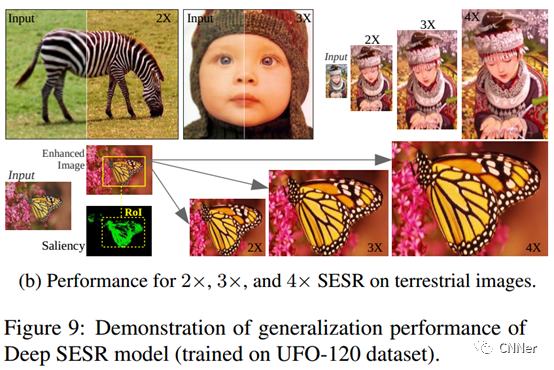
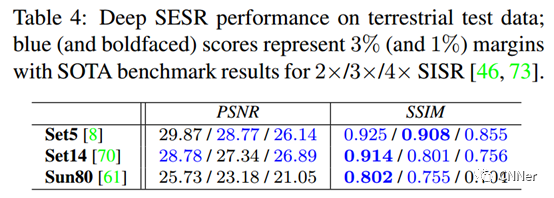
为解决水下机器人视觉的同步增强与超分辨率(simultaneous enhancementand super-resolution,SESR)问题,本文提出了Deep SESR模型,为近实时应用提供了一种有效的解决方案。在本文中Deep SESR是一种residual-in-residual network-based的生成模型,可以学习在2、3或4个更高的空间分辨率下恢复感知图像质量。我们通过制定一个多模态目标函数来监督模型的训练,该函数解决了特定颜色的水下颜色退化、缺失图像清晰度和高层次特征表示损失的问题。它还监督学习图像中突出的前景区域,进而引导网络学习全局对比度增强。本文中还设计了端到端的训练方式,在共享的层次特征空间上联合学习显著性预测和SESR,从而实现快速推理。此外,提出了第一个方便大规模的SESR学习的数据集——UFO-120,包含了1500多个训练样本和120个样本的基准测试集。通过对UFO-120和其他标准数据集进行深入的实验评估,证明了Deep SESR在水下图像增强和超分辨率方面优于现有的解决方案。同时,我们也验证了DeepSESR在几个测试用例(具有不同光谱和空间退化水平的水下图像,以及具有不可见的自然物体的陆地图像)中的泛化性能。最后,我们分析了Deep SESR在单板部署中的计算可行性,并展示了它在水下机器人视觉导航中的操作优势。
下面是论文具体框架结构以及实验结果:













人工智能,每日面试题:
bootstrap数据是什么意思?
A.有放回地从总共M个特征中抽样m个特征
B.无放回地从总共M个特征中抽样m个特征
C.有放回地从总共N个样本中抽样n个样本
D.无放回地从总共N个样本中抽样n个样本
每日面试题,答案:
号主答案:C
声明:文章来自于网络,仅用于学习分享,版权归原作者所有,侵权请加上文微信联系删除。
从0到1学习SLAM,戳↓
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
PS:公众号最近更改了推送规则,不再按时间顺序推送,而是根据智能推荐算法有选择性向用户推送,有可能以后你无法看到计算机视觉life的文章推送了。
解决方法是看完文章后,顺手点下文末右下角的“在看” ,系统会认为我们的文章合你口味,以后发文章就会第一时间推送到你面前的,比心~