SLAM面试问题大全
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
秋招求职,职位意向 SLAM 相关:做自动驾驶, AR/VR,自主移动机器人面试过程必然有相应问题抛出。
现在总结为以下三个模块:
1.必知必会
2.加深理解
3.额外了解
01
—
必知必会
1, GN 和 LM 的迭代过程及优劣
2,单应矩阵 H 和基础矩阵 F 的区别(至少两个方面),推导两者的求解过程及改进求解的方法
3,相机在纯旋转下,单应矩阵和基础矩阵怎么应用,单目怎么做到初始化和三角
测量
4,单目初始化的目的及两种方法
5,三角测量的过程及代码实现,有哪些不确定性及如何提高三角测量的精度
6,相机标定原理及实现过程,棋盘格有哪些好处
7,什么是对极约束?基础矩阵 F 的推导过程, F 的秩
8, RANSAC 的过程及在基础矩阵 F 求解上的应用,代码实现一个例子
9,什么是 BA?推导相机投影模型的雅克比矩阵 J,以及 J 的每一项代表的含义
10,求解 BA 问题用的最多的 G2o,说明 G2o 的顶点和边代表的含义以及类型
11,解释图优化中图的稀疏性,图优化流程
12,边缘化过程及可能存在的问题
13,解释鲁棒核函数
14,推导直接法 BA,直接法的分类,三个假设及优劣
15,解释图像非凸性的概念
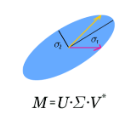
16, ICP 算法的流程,哪个坐标系下?推导求解过程两种方法( SVD 分解和 BA)
17,解释相机重投影误差,即间接法,推导重投影误差的 J
18,经常说的雅克比有什么作用,它有哪几部分组成?
19, PNP 流程及 DLT 求解过程
20, P3P 求解过程,缺点及改进 EPNP 概述
21, PNP 与图优化的关系,即 PNP 中的顶点和边在图优化中的表示
02
—
加深理解
22,图像处理的目的,图像传输 的方式,什么是数字图像和模拟图像
23,解释图像的采样和量化(最近邻采样和插值采样)
24,解释图像质量(层次,对比度,亮度,尺度,尺寸,饱和度,高斯卷积核)
25,像素之间的关系( 4 近邻, D 近邻, 8 近邻)
26,根据像素之间的关系解释像素之间的连通,连通的两个必要条件。m 连通?怎么提取连通像素组成的区域?
27,像素之间的距离:欧氏距离,城市距离( D4 距离),棋盘距离( D8 距离)怎么计算区域之间的距离?
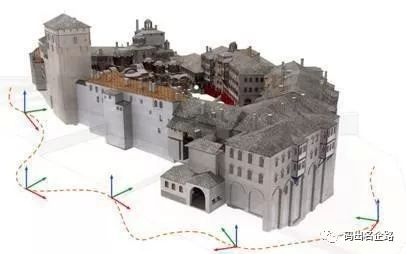
28,三维模型重建流程
29,点为特征点的基本要求:解释 Harris 角点的原理,流程,非极大值抑制,特点
30,解释尺度空间(高斯空间) LOG 算子的流程
31,解释 SIFT 算子流程,特点;fast 算子, ORB 算子,并比较异同
32,如何获取尺度不变性和旋转不变性
33,解释特征描述子,基于直方图的描述子和二进制描述子,特点
34,特征匹配;距离度量(欧式距离,马氏距离,汉明距离)及匹配策略(最近邻搜索和最近邻距离比)
35,点的齐次坐标和向量齐次坐标的区别,应用
36,相机模型成像过程,及逆过程,逆变换,畸变模型中理想像素点和畸变点的对应数学表达式,并用它解算矫正原理
37,解释归一化像平面和像平面
38,对极约束的推导,得出基础矩阵 F 和本质矩阵 E,解释极线约束的物理意义
39,基础矩阵 F 的特点(自由度,秩,奇异值)求解过程( 8 点法,RANSAC 方法流程),解释 8 点法求解过程中 SVD 分解的奇异值约束,根据奇异值约束对 F 进行重构
40,本质矩阵 E 的特点(自由度,秩,奇异值),求解 E,并用 E 进行相机姿态恢复(用图解释四种姿态,并说明如何旋转正确的姿态( 2 种策略))
41,单应矩阵 H 的特点(自由度,秩)及应用,求解( 4 对匹配点和 RANSAC 流程)
03
额外了解
42,三角测量流程,求解过程, RANSAC 解算流程,如何减少三角测量的误差
43, pnp 求解过程, p3p 及 epnp
44,BA 求解的三种方法(最速下降法, GN,LM)
45,BA 的数学模型,几种 BA 对的形式求解( 1,同时优化相机参数和三维点;2,固定三维点坐标,优化相机参数;3,固定相机参数,优化三维点坐标)
46,单目相机内参数共享的 BA 表达
47, SFM:通过相机运动同时恢复相机参数和场景结构,其流程?????细
节????难点????
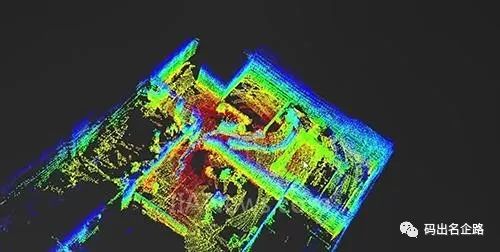
48,稠密重建:稠密点云获取方式?极线搜索?两个假设(光度一致性和可视性约束?)
49,多视角立体技术的三种方法( 1,基于体素方法 2,基于空间 patch 扩散方法 3,基于深度图融合方法?流程?特点?)
50,基于深度图融合方法进行多视角重建:优点?全局视角和局部视角的选择?区域生长法扩张?非线性深度优化流程?
从零开始学习三维视觉核心技术SLAM,扫描查看介绍,3天内无条件退款

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
欢迎加入从零开始学习SLAM知识星球,详见:如何从零开始系统化学习视觉SLAM?
推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
从零开始一起学习SLAM | 用四元数插值来对齐IMU和图像帧
给优秀的自己点个赞