CVPR 2022 | 图像也是德布罗意波!华为诺亚&北大提出量子启发MLP,性能超越Swin Transfomer

极市导读
来自华为诺亚方舟实验室、北京大学、悉尼大学的研究者提出了一种受量子力学启发的视觉 MLP 新架构。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
来自华为诺亚方舟实验室、北京大学、悉尼大学的研究者提出了一种受量子力学启发的视觉 MLP 新架构。
近年来,计算机视觉领域的新型架构层出不穷,包括视觉 Transformer、MLP 等,它们在很多任务上都取得了超越 CNN 的性能,受到广泛关注。其中,视觉 MLP 具有极其简单的架构,它仅由多层感知器(MLP)堆叠而成。与 CNN 和 Transformer 相比,这些简洁的 MLP 架构引入了更少的归纳偏置,具有更强的泛化性能。
然而,现有视觉 MLP 架构的性能依然弱于 CNN 和 Transformer。来自华为诺亚方舟实验室、北京大学、悉尼大学的研究者提出了一种受量子力学启发的视觉 MLP 架构,在 ImageNet 分类、COCO 检测、ADE20K 分割等多个任务上取得了 SOTA 性能。
论文地址:https://arxiv.org/abs/2111.12294
PyTorch 代码:https://github.com/huawei-noah/CV-Backbones/tree/master/wavemlp_pytorch
MindSpore 代码:https://gitee.com/mindspore/models/tree/master/research/cv/wave_mlp
Wave-MLP
该研究受量子力学中波粒二象性的启发,将 MLP 中每个图像块 (Token) 表示成波函数的形式,从而提出了一个新型的视觉 MLP 架构——Wave-MLP,在性能上大幅超越了现有 MLP 架构以及 Transformer。
量子力学是描述微观粒子运动规律的物理学分支,经典力学可被视为量子力学的特例。量子力学的一个基本属性是波粒二象性,即所有的个体(比如电子、光子、原子等)都可以同时使用粒子的术语和波的术语来描述。一个波通常包括幅值和相位两个属性,幅值表示一个波可能达到的最大强度,相位指示着当前处在一个周期的哪个位置。将一个经典意义上的粒子用波(比如,德布罗意波)的形式来表示,可以更完备地描述微观粒子的运动状态。
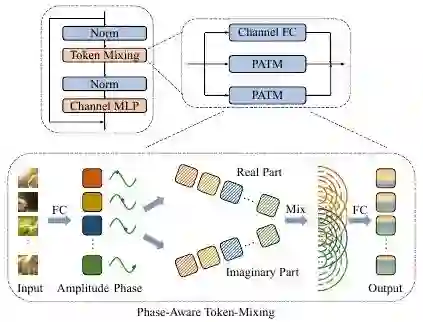
那么,对于视觉 MLP 中的图像块,能不能也把它表示成波的形式呢?该研究用幅值表达每个 Token 所包含的实际信息,用相位来表示这个 Token 当前所处的状态。在聚集不同 Token 信息的时候,不同 Token 之间的相位差会调制它们之间的聚合过程(如图 3 示)。考虑到来自不同输入图像的 Token 包含不同的语义内容,该研究使用一个简单的全连接模块来动态估计每个 Token 的相位。对于同时带有幅度和相位信息的 Token,作者提出了一个相位感知 Token 混合模块(PATM,如下图 1 所示)来聚合它们的信息。交替堆叠 PATM 模块和 MLP 模块构成了整个 Wave-MLP 架构。
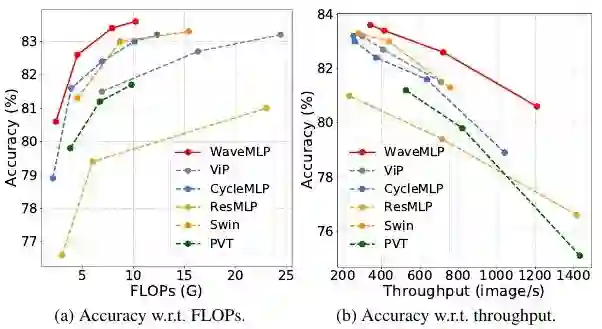
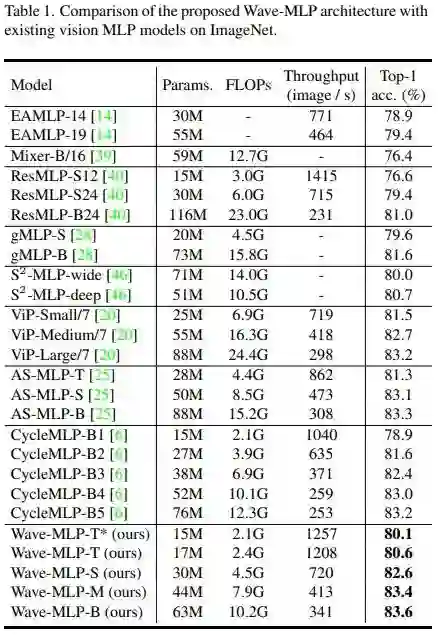
相比现有的视觉 Transformer 和 MLP 架构,Wave-MLP 有着明显的性能优势(如下图 2 所示)。在 ImageNet,Wave-MLP-S 模型上以 4.5G FLOPs 实现了 82.6% 的 top-1 准确率,比相似计算代价的 Swin-T 高 1.3 个点。此外,Wave-MLP 也可以推广到目标检测和语义分割等下游任务,展现出强大的泛化性能。
用波表示 Token
在 Wave-MLP 中, Token 被表示为同时具有幅值和相位信息的波 ,
其中 i 是满足 i^2 = -1 的虚数单位,|·| 表示绝对值运算,⊙是逐元素乘法。幅值 |z_j| 是实值的特征,表示每个 Token 所包含的内容。θ_j 表示相位,即 Token 在一个波周期内的当前位置。
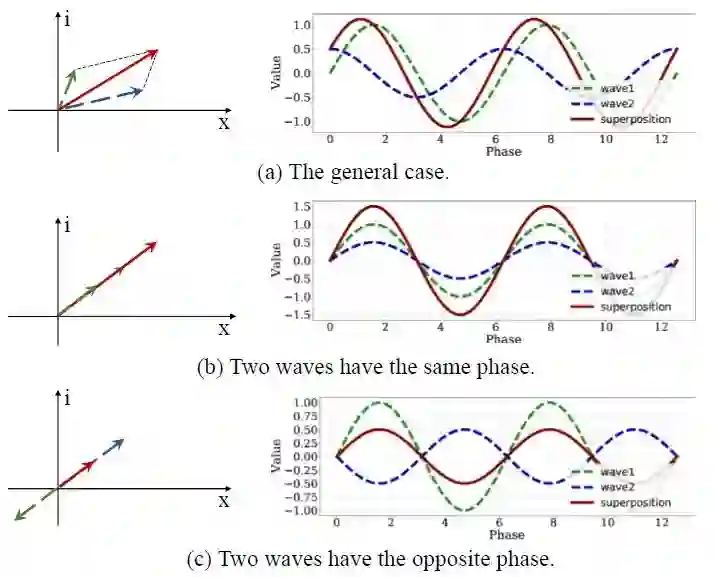
两个 Token 之间的相位差对它们的聚合过程有很大影响 (如下图 3 所示)。当两个 token 具有相同的相位时,它们会相互增强,得到幅值更大的波(图 3(b));当两个 token 相位相反时,他们合成的波将相互减弱。在其他情况下,它们之间的相互作用更加复杂,但仍取决于相位差(图 3(a))。经典方法中使用实值表示 token 的,这实际上是上式的一个特例。
相位感知的 Token 聚合
公式(1)中包含幅值和相位两项,幅值 z_j 类似于实值特征,可以采用标准的 Channel-FC 生成:

对于相位,可以使用多种方式来估计。为了使得相位可以捕获每个输入的特定属性,该研究使用一个可学的估计模块来生成相位 θ_j。在获得幅值 z_j 和相位 θ_j 之后,可以根据公式(1)得到 Token 的波函数表示 。同时,公式(1)可以采用欧拉公式展开成连个实值向量拼接的形式:

表示不同的 Token 波函数会通过一个 Token-FC 聚合起来,得到复数域的输出:

类似于量子计算中的测量过程,复数域的需要映射到实数域里才能得到有意义的输出值。将实部和虚部做按照一定的权重进行求和,得到模块的输出:
在视觉 MLP 中,该研究构建了一个相位感知模块(PATM,图 1)来完成 Token 聚合的过程。交替堆叠 PATM 模块和 channel-mixing MLP 组建了整个 WaveMLP 架构。
实验结果
该研究在大规模的分类数据集 ImageNet, 目标检测数据集 COCO 和语义分割数据集 ADE20K 上都进行了大量实验。
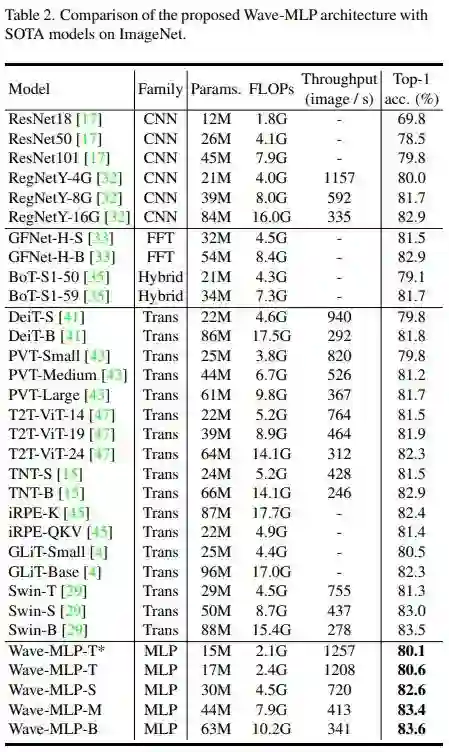
ImageNet 上图像分类的结果如表 1,表 2 所示:相比于现有的 Vision MLP 架构和 Transformer 架构,WaveMLP 都取得了明显的性能优势。
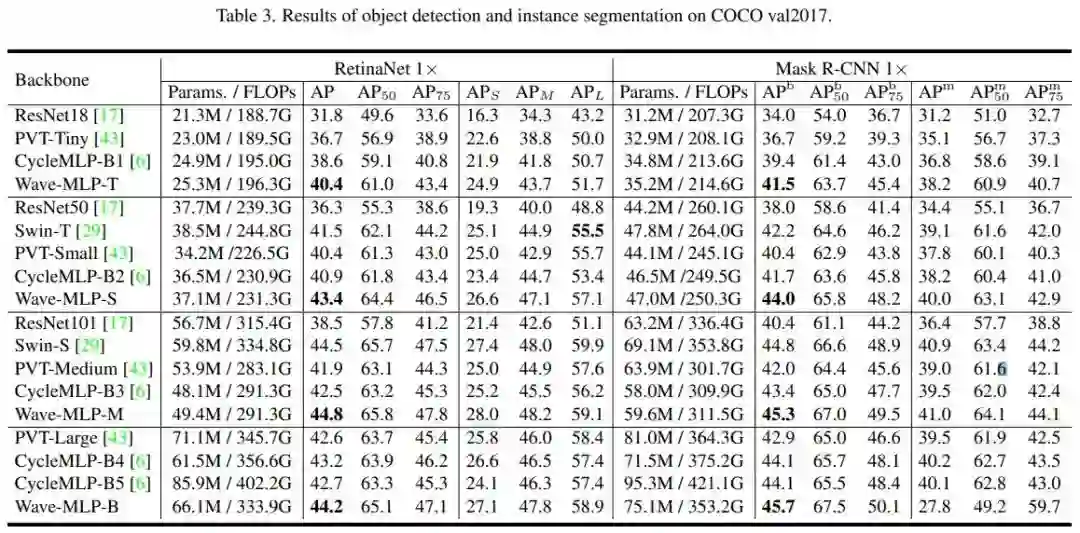
在下游目标检测、语义分割等任务中,Wave-MLP 同样表现出更优的性能。
公众号后台回复“数据集”获取60+深度学习数据集下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~





