


项目名称: 无人机实时全景遥感成像技术研究
项目编号: No.41301370
项目类型: 青年科学基金项目
立项/批准年度: 2014
项目学科: 天文学、地球科学
项目作者: 王敏
作者单位: 中国人民解放军理工大学
项目金额: 25万元
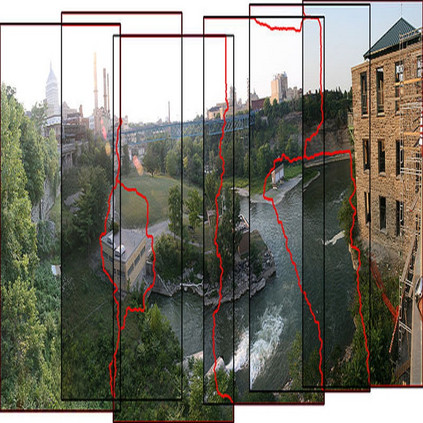
中文摘要: 针对目前无人机全景成像遥感系统采用的基于图像拼接全景成像技术的成像速度慢,实时性差,不能获得动态完整的全景图像,且获取图像的数据量较大、拼接算法复杂等缺点,本项目着重研究无人机实时全景成像遥感技术。从无人机运动与动力学、遥感学、图像处理等理论出发,(1)详细分析无人机运动状态、后期图像处理等对无人机成像的影响,建立利用折反射全景成像原理搭载在无人机上的全景光学成像系统,即光线经过若干个折反射镜进行折反射后进入摄像头内,从而获取到全景图像;(2)建立基于不同形式运动的畸变补偿模型和几何校正方法;研究基于小波和奇异值方向特征的去噪、改进的自适应非线性增强、小波方向能量融合等图像处理新算法解决无人机实时成像图像质量不高的问题。项目研究成果可为工程上实现无人机实时全景立体遥感成像系统提供依据,也可应用于有人飞机、微型飞行器、机器人等平台,以及海关、银行等其它社会安全监测场所,构成实时全方位监控系统。
中文关键词: 无人机;全景成像;图像拼接;图像畸变;图像处理
英文摘要: UAV panoramic imaging remote sensing system based on image stitching panoramic imaging technology is slower and poor real-time, can not get a full panoramic image more dynamic, the data of the large amount of data for imaging is vary large, stitching algorithm is also complex and many other shortcomings. This project focus on the new theory and new technology of UAV real-time panoramic stereo remote sensing imaging. From UAV movement and dynamics, remote sensing science, image processing theory, analysis the UAV state of motion, and post-image processing, such as UAV imaging detailed, establishes UAVs panoramic optical imaging system using catadioptric panoramic imaging principles, study the new image processing algorithm to solve the problem UAV high image quality of real-time imaging. Project research on the new UAV real-time panoramic stereo remote sensing imaging system to provide the basis for the engineering, can also be applied to manned aircraft, MAV, robotics platform, as well as customs, banks, and other social safety monitoring sites constitute the real-time all-round monitoring system.
英文关键词: UAV;panoramic imaging;image stitching;image distortion;image processing
成为VIP会员查看完整内容
相关内容
Arxiv
100+阅读 · 2020年2月20日
相关VIP内容
相关资讯
相关论文
Arxiv
100+阅读 · 2020年2月20日