

项目名称: 行车安全辅助系统中车载3D虚拟全景成像研究
项目编号: No.61304202
项目类型: 青年科学基金项目
立项/批准年度: 2014
项目学科: 自动化技术、计算机技术
项目作者: 戈志伟
作者单位: 中国科学院微电子研究所
项目金额: 26万元
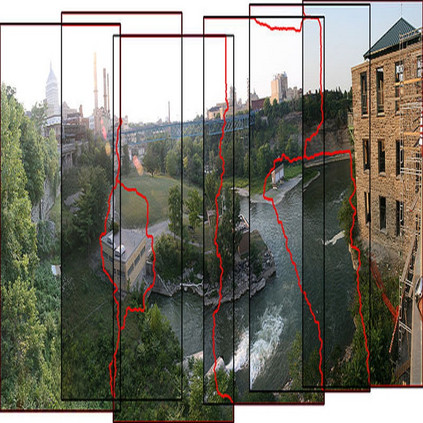
中文摘要: 车载3D虚拟成像技术能够解决传统鸟瞰成像中视野范围受限的问题,又能实现汽车主动安全,是基于视觉的行车安全辅助技术的基础。超广角鱼眼图像的标定与畸变校正、非线性畸变图像的全景拼接与模型映射以及基于全景成像的汽车主动安全是车载3D虚拟成像技术中急待解决的三个关键问题,此三个问题的解决对提高智能交通和行车安全具有重要意义。本项目立足于基于视觉的行车安全辅助技术,研究超广角鱼眼摄像机的自动标定与畸变校正算法,研究基于动态时间校正算法的最佳拼接缝隙对准方法,研究3D虚拟场景建模及全景图像在该模型下的投影映射,研究基于双路摄像头的车道偏离预警技术,最终在建立的超广角鱼眼镜头模型上实现自动标定和畸变校正,实现广视角下动态场景的非线性畸变图像的远近区全景成像,并在全景图像中实现基于双路摄像头的车道偏离预警。研究成果为探索基于视觉的行车安全辅助系统提供基础和技术方法,并广泛用于智能交通和车辆主动安全。
中文关键词: 行车辅助安全;3D虚拟;图像拼接;摄像机标定;车道偏离预警
英文摘要: Vehicle 3D virtual imaging technology can provide the surrounding images of a vehicle in 3D view which guarantees the driver sufficient field of view, as well as achieves the vision based vehicle active safety system. Camera calibration and distortion correction of the super wide-angle fish-eye camera, panoramic images stitching and 3D model mapping, the vehicle active-safety system which is based on the stitched images are the three key problems in vehicle 3D virtual imaging technology. This project includes the researches on camera calibration and distortion correction algorithm with super wide-angle fish-eye camera, the optimal seam registration based on the dynamic time warping algorithm, the stitched images mapping to the 3D virtual model, the lane departure warning based on front and rear cameras. The results of this research can be applied to new developments in vision based driver assist technology and will be widely used in intelligent transport systems and active safety system.
英文关键词: ADAS;3D virtual;image stitching;camera calibration;lane depature warning
成为VIP会员查看完整内容
相关内容
专知会员服务
32+阅读 · 2019年11月28日
Arxiv
0+阅读 · 2022年4月19日
相关VIP内容
专知会员服务
32+阅读 · 2019年11月28日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月19日