成为VIP会员查看完整内容
VIP会员码认证
首页
主题
发现
会员
服务
注册
·
登录
模式识别
关注
12041
模式识别 Pattern Recognition
综合
百科
VIP
热门
动态
论文
精华
新加坡已经不再适合中产
创业邦杂志
2+阅读 · 2022年11月18日
AI大神李沐开源新手剪辑神器!只看字幕就能剪视频,卡壳重复片段一键删除
量子位
1+阅读 · 2022年11月9日
在 Linux 新版内核中的 Rust 初探,原来是这样的!
CSDN
0+阅读 · 2022年10月14日
近百个大数据开源项目,你该如何选型?|《开源大数据热力报告2022》入围项目公示
InfoQ
1+阅读 · 2022年10月10日
去往「夜之城」的故事背后:CDPR 开发团队核心成员专访
少数派
0+阅读 · 2022年10月10日
清华读博前两年的焦虑与成长|鹅厂AI Lab研究员分享
新智元
1+阅读 · 2022年10月8日
让程序员早点下班的《技术写作指南》
极市平台
2+阅读 · 2022年7月16日
让程序员早点下班的《技术写作指南》
量子位
2+阅读 · 2022年7月16日
印度萌新令人绝望的操作:提交PR“轰炸”近40万开发者,GitHub负责?
AI前线
0+阅读 · 2022年6月11日
印度萌新令人绝望的操作:提交PR“轰炸”近40万开发者,GitHub负责?
InfoQ
0+阅读 · 2022年6月8日
18 岁 GitHub“萌新”提交 PR,意外“轰炸”了近 40 万名开发者......
CSDN
0+阅读 · 2022年6月6日
苹果知名开发者怒“怼”:GitHub 不可信,俄罗斯开发者贡献的项目遭毁灭性打击!
CSDN
0+阅读 · 2022年4月22日
苹果热门开源项目首席维护者怒了:GitHub封停俄罗斯开发者账户,贡献痕迹惨遭删除
AI前线
0+阅读 · 2022年4月22日
入选顶会CVPR,火山引擎虚拟换装技术大突破
量子位
2+阅读 · 2022年4月19日
畅玩新方式 | Google Play 游戏 Beta 版在 PC 上发布
谷歌开发者
0+阅读 · 2022年4月15日
参考链接
父主题
机器视觉
人工智能
子主题
语音识别
文字识别
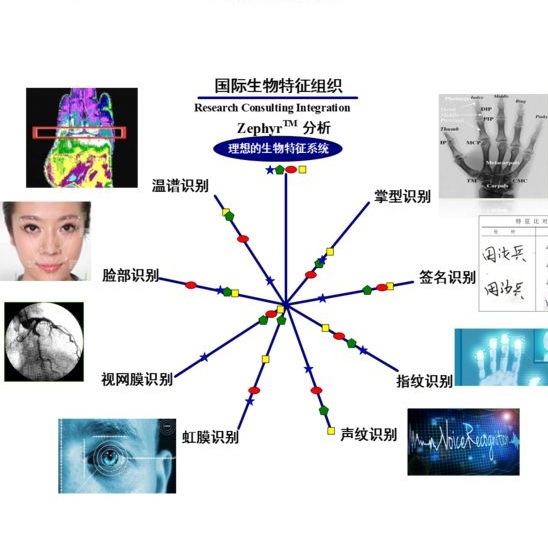
生物特征识别
人脸检测
图像识别
提示
微信扫码
咨询专知VIP会员与技术项目合作
(加微信请备注: "专知")
微信扫码咨询专知VIP会员
Top