

本文介绍了动态目标跟踪应用中的数据融合网络的软件框架。该框架背后的想法是促进完整的分布式融合网络或特定部分的实施和评估,例如,通信和数据压缩的策略。该框架由抽象出分布式数据融合网络所需基本构件的类组成。该框架提供了一个快速原型设计的工具,并促进了对目标跟踪应用中分布式融合网络的评估。对多静态和移动传感器、通信和融合网络的研究兴趣表明了这种工具的重要性。具体来说,就是为评估不同的融合结构、算法和传感器类型的预期性能提供数据。
引言
由多个异质传感器组成的网络中的数据融合是一个重要的研究领域,特别是用于态势感知的目标跟踪。越来越多的传感器和移动传感器的能力引起了哪些数据需要通信以及如何通信的问题。在一个最佳设置中,所有的传感器都能与中央融合中心进行通信。由于通信带宽有限,这种情况并不总是存在,而且对于大型的传感器网络来说,这可能不是最好的解决方案。分布式融合架构提供了一种更加灵活和稳健的数据融合方式,因为某种程度的融合可以由传感器本身作为本地融合节点来执行。本地融合的数据是传感器数据的一个更紧凑、更精细的表示,可以与网络中的其他节点进行交流。此外,这使得只暴露出融合数据而不是原始数据的传感器得以整合。
在目标跟踪中,融合数据对应于检测到的目标的估计运动轨迹。在一个分布式的目标跟踪网络中,估计的轨迹被交流和融合,而不是来自例如雷达或相机传感器的原始探测。为了融合轨迹,采用了轨迹对轨迹的融合(T2TF)方法。存在精确的T2TF方法[1]。精确方法的缺点是需要对估计值之间的相关性有充分的了解,这反过来又要求有更多的信息被传递,而这些信息可能是不可用的。
为了弥补这一点,人们可以应用处理未知相关性的融合算法,如反协方差交集(ICI,[2])。ICI算法与众所周知的协方差交叉(CI,[3])算法的方法相同。该算法处理待融合的估计值之间存在的未知协方差,这是分布式融合网络的核心。与CI相比,ICI算法是一个不太保守的选择,但在许多情况下仍然是一致的。该算法是为估计值之间存在共同信息的情况而定制的。这通常是分布式目标跟踪网络中的情况,其中一个共同的目标模型被用来跟踪检测到的目标。以前的工作在[4]和[5]中提出,真实数据被用来评估监控应用中的这种融合算法。
在信息领域,诸如信道缓存(CC,[6])这样的融合基础设施可以用来处理信息不被重复使用,也就是重复计算。信道缓存是基于一个由信道滤波器[7]启发的单一连接的树形拓扑网络。与信道滤波器相比,信道缓存在传输时不跟踪节点之间的共同信息。这意味着一种更容易的通信方式,因为一个节点只是传输它的本地独立信息。收到的信息被存储在本地信道缓存中,该缓存保持了每个轨道和节点的贡献信息的历史。由于信息是加法的,延迟的信息可以很容易地被添加到缓存中,例如,在临时的通信损失中。从整合的角度来看,它使传感器的临时连接成为可能,如一个被激活的无人机,以更新一个特定目标。在一个节点上,只需将所有本地和缓存中收到的来自特定目标的信息相加,就可以建立一个全局轨道。
为了在网络中实现一个共同的态势图,需要有效的通信。特别是当链路的带宽有限和通信条件不同的时候。在有限的通信链路上发送数据需要制定发送什么和何时发送的策略。处理动态通信条件需要网络拓扑结构对单个节点的零星损失具有鲁棒性。
这些方面促使我们建立一个框架来促进分布式的融合网络的实施和模拟。在这里,我们重点关注分布式的目标跟踪应用,以及不同的融合方法选择、数据关联和通信策略如何影响跟踪性能。我们提出了一个用MATLAB™编写的基于抽象类结构的软件框架,以及用于仿真和评估的工具(2.0节)。最后,该框架被用于一个案例研究,以介绍如何在一个特定的区域监控场景中使用该框架来评估通信策略和融合基础设施的不同选择(第3.0节)。
仿真框架
该框架分为两部分:结构和模拟。第一部分由实施和设计的构件组成,抽象出分布式融合网络的核心功能。第二部分处理仿真,以支持在确定的场景中对已实施的网络进行评估。
2.1 架构
架构中最基本的构件是节点和链接。节点是一个对象的抽象,它可以与其他节点连接以创建一个网络。链接是对两个节点之间的通信通道和数据运输的抽象化。一个融合数据的节点被称为融合节点。融合节点继承了节点类的额外属性和功能。它仍然是抽象的,必须由用户来实现。所需的功能由具有共同接口的对象表示,以方便实现。这些对象抽象了本地融合、轨道融合、数据关联和通信管理。节点、链接和融合节点对象被归入网络和融合对象中。为了将这些对象与物理对象连接起来,我们有这样的对象:平台和传感器。一个平台对象抽象了一个具有位置和速度等属性的物理对象。传感器对象抽象出一个物理传感器,它可以观察物理世界,并根据测量模型产生观察结果。以上描述的对象,如图1所示,是构成该框架实施部分的基础的核心对象。
为了更详细地描述融合节点,图2展示了它的属性、功能和数据流。箭头显示了内部对象和外部对象之间的数据流。抽象的功能对象用粗边框表示。使用来自安装的传感器的测量值,轨道由本地融合器对象(如目标跟踪器)估计,并作为本地轨道存储。通信管理器封装了处理数据传输和接收逻辑的所有功能。例如,可以在通信管理器中实现一个智能逻辑,比较本地和接收的数据,并只传输信息量最大的数据。收到的轨迹数据被存储为远程轨迹。全局轨道的生成由轨道融合器处理,使用关联器对象计算的关联。在这里,关联代表了一个假设,即一个本地或远程轨道与一个全局轨道来自同一个目标。使用这种架构可以实现和设计不同类型的融合基础设施,并结合不同的融合算法和关联逻辑。
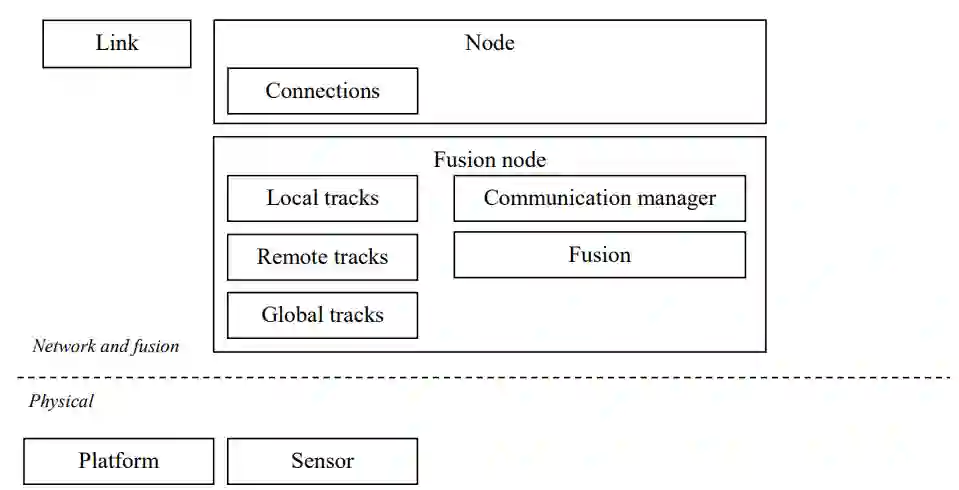
图 1:框代表不同对象的框架架构。基础对象是链路、节点、平台和传感器。融合节点继承了具有附加属性和功能的节点对象。虚线将网络和融合对象与物理对象分开。
2.2 仿真
网络和融合对象通过应用离散时间步进方案支持仿真。仿真在一个时间循环中运行,对象在时间上以特定的顺序向前迈进。物理对象通过通用接口集成到仿真中,支持随机生成数据或读取预定义的数据,如轨迹和探测。当模拟循环开始时,物理对象的数据被生成或读取。在模拟过程中,每个时间步骤都重复三个步骤:推进物理对象,处理所有节点中的可用新数据,推进链接。仿真循环可以扩展到处理多次仿真,即蒙特卡洛。
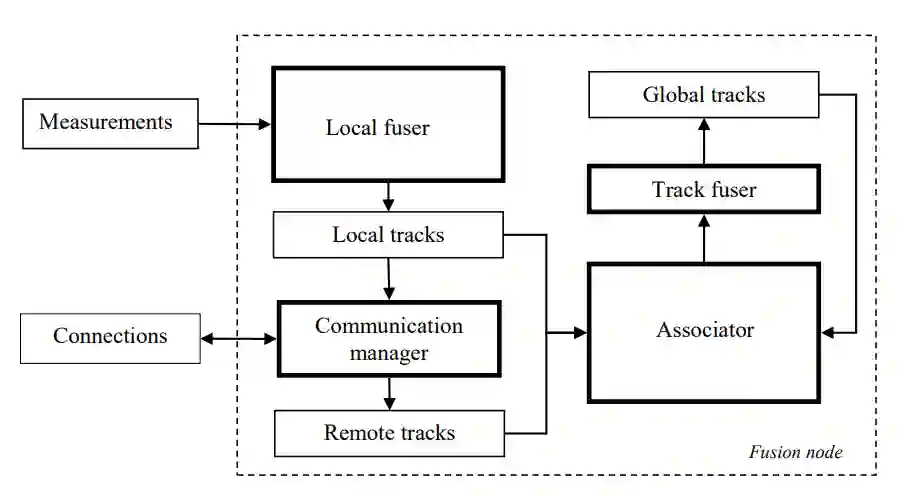
图 2:更详细的融合节点对象。虚线表示融合节点的边界。粗线框是要由用户实现的抽象对象。本地测量由本地融合器处理。通信管理器处理如何发送和接收数据。全局轨道由轨道融合器使用关联器计算的关联生成。

