
多机器人协同与协作是提升团队能力并实现自主建造、农业及未知大区域持续作业等应用场景新型任务的关键行为。本研究以“多机器人资源分配问题”为背景探究此类行为,该问题要求将机器人分配至待服务区域。我们尤其关注适用于大规模多机器人团队的“容错性方法”。我们引入一种基于图的建模框架用于多机器人资源分配问题,该框架在表征“区域间关系”与“奖励模型”方面具有前所未有的丰富性。首先,针对“多智能体覆盖控制问题”,通过图神经网络(GNN)引入“基于图的计算方法”,其利用学习型智能体间通信策略,在性能与可扩展性上显著提升。随后,研究需要显式协同的“复杂多任务场景下多机器人任务分配问题”,提出一种“基于网络流的规划方法”,可在数秒内为大规模问题生成高质量解。进一步将该方法扩展至在线场景,支持任务失败与意外观测时的动态重规划。实证研究表明,这些建模方法与算法通过挖掘多机器人问题中的本质图结构特征,实现了性能突破并推动领域技术前沿发展。
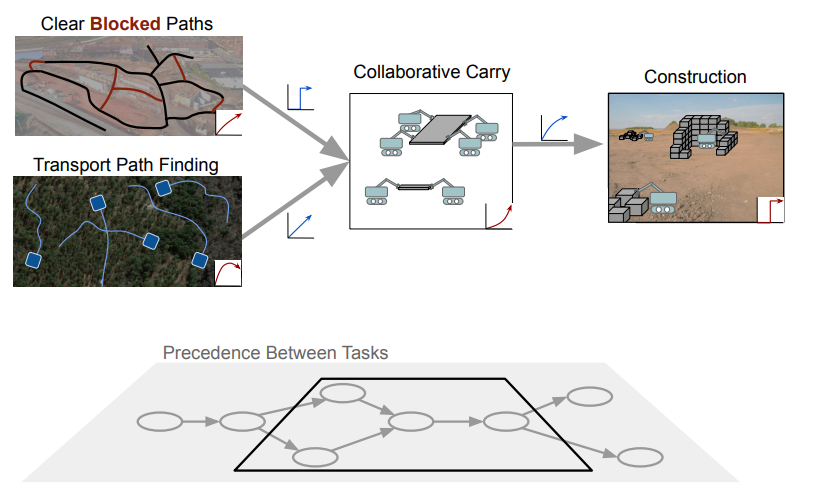
图:任务图(底部)展示任务间优先关系。高亮部分为任务子集,显示“联盟职能”(红色)与“优先关系”(蓝色)。例如,在执行“运输建筑材料”任务前,机器人需在布满碎片的工地“寻路或清障”。路径质量直接影响团队运输效率;而运输表现(如材料损毁情况)将决定后续“施工任务”的执行速度与质量。
第一章将本研究置于“多机器人资源分配”领域框架内。首先,提出多机器人资源分配领域内的问题分类体系,沿着“任务表征抽象度”维度梳理问题模型及其对应研究方法。随后,深入综述与“多机器人覆盖控制”及“多机器人任务分配”密切相关的文献,这些成果为本研究提供了核心理论支撑。
第二章《基于图神经网络的多机器人系统覆盖控制》提出一种创新方法,解决“感知半径受限条件下的多机器人覆盖控制”问题。相较于文献常用基准控制器,该方法通过智能体间通信机制显著提升控制器的性能与鲁棒性。为实现这一目标,在机器人间通信网络上部署图神经网络(GNN),训练其预测集中式全知控制器的输入指令,从而生成能够通过智能体通信应对复杂覆盖控制场景的控制器。实验证明,该控制器性能显著超越基准方法,且具备优异的可扩展性与泛化能力。首次构建基于全球城市真实兴趣点特征的覆盖控制问题数据集,并用于算法验证。这是图神经网络学习型控制器在多机器人覆盖控制领域的首次应用,展现出巨大潜力。
第三章《具有任务优先关系的多机器人协同与协作》针对“多机器人任务分配(MRTA)”问题提出新型建模框架与求解方法体系。首次将“优先级约束”与“多机器人任务”纳入MRTA问题,构建名为“任务图”的建模框架——以图节点表示任务,边表示任务间优先级关系。该框架包含的“奖励模型”能通过丰富函数空间表征关联任务性能间关系及任务分配联盟规模与任务绩效间关系。基于此模型,开发出利用网络流优化的任务分配解决方案,其求解速度较现有方法提升数个量级,且计算复杂度与任务执行机器人数量无关,可扩展至无限规模团队。实验表明,该方法在保证解质量的同时实现计算效率突破,为任务分配建模框架作出根本性贡献。
在第四章中,拓展了多机器人任务分配(MRTA)方法,提出《在线环境下的多机器人优先关系协同与协作》。本章沿用相同“任务图”模型与“基于流网络的求解方法”,将其置于在线框架以提升系统鲁棒性与性能,并通过高保真仿真器验证方案有效性。核心在于,在原有MRTA问题中引入“不确定性”考量——任务可能随机失败或产生求解器未预期的随机奖励。依托流网络方法的高速求解优势,以迭代方式重构求解流程,使系统能够基于已完成任务的奖励观测实时重规划。该方法显著提升了存在环境不确定性时的规划性能,甚至因解空间扩展在零误差条件下进一步优化结果。在高保真城市环境多智能体仿真器中验证了该在线方法及离线流网络方法,其中任务奖励基于仿真器内物理现象量化。实验表明,该建模方法能有效预测高不确定性复杂任务的性能表现,且相较文献方法具有显著优势。在线框架为原有方案注入鲁棒性,并将性能提升至接近最优水平,为任务分配领域持续研究提供了极具前景的框架。

