
本文系统回顾了无人地面车辆(UGV)与无人机(UAV)整合技术的最新进展。重点探讨了整合过程中的关键挑战(如通信协议差异、传感器互操作性、网络安全问题)、创新解决方案(如统一机器人协议URP、模块化载荷系统、人工智能驱动的集群智能),以及实际应用案例和未来技术方向。
UGV与UAV的整合代表了自主系统协调的变革性飞跃,但存在通信、传感器、安全等持久性挑战;通过提出统一机器人协议(URP)、区块链安全层、AI集群智能等新技术,可以显著提升系统互操作性、任务协调性和韧性。论文采用结构化综述方法,基于六项评估指标(互操作性、实时通信、传感器融合精度、自主性与AI集成、操作效率、网络安全)分析现有文献,并提出一个多层级技术框架,为未来研究提供路线图。以下将分章节详细分析论文的主要内容。
1. 概述与背景
UGV和UAV的整合结合了地面机动性和空中灵活性,能应对复杂现实任务(如监视、应急响应、军事行动),但通信协议差异、传感器互操作性问题和自主框架不匹配导致整合挑战。作者通过综合当前文献和现场实践,批判性分析这些差距,并引入新颖的统一机器人协议(URP),该协议支持ROS和MAVLink系统间的实时通信,并通过区块链技术确保安全。此外,还提出AI驱动的集群智能和模块化载荷系统,以增强去中心化任务分配和操作适应性。关键发现显示,在现实约束下,系统互操作性、任务协调和韧性有显著改善。论文最后提出了推进安全、可互操作和智能多智能体系统的路线图。
引言部分(第1节)进一步阐述了整合的背景:过去几年,UGV与UAV的整合是无人载具领域的巨大进步,两者合并能解决许多领域的复杂问题。UGV能运载重货并穿越复杂地形,增强UAV的性能(UAV擅长空中监视、实时数据收集和快速部署)。尽管在CAx相关开发中存在机械挑战,但两者的操作协同潜力能提升态势感知、决策和资源分配。近期研究(如Tang等人的EN-MASCA算法和Alonso-Mora等人的反应式任务规划方法)提供了宝贵见解,但缺乏跨平台通信和鲁棒数据融合的统一解决方案,且忽视了基于区块链的安全集成和去中心化任务执行。为此,论文的贡献包括:(i) 提出URP桥接ROS和MAVLink生态系统;(ii) 引入区块链验证的安全数据层;(iii) 纳入集群智能;(iv) 通过现实案例验证。这些贡献旨在克服当前整合方法中的碎片化问题。
论文的结构分为七大部分:引言(包括问题定义、评估指标和方法论)、挑战与技术障碍(第2节)、新颖解决方案(第3节)、现实应用案例研究(第4节)、新兴技术与未来方向(第5节)、结果与关键发现(第6节)以及结论(第7节)。这种结构使论文逻辑清晰,从问题分析到解决方案,再到应用验证和未来展望。
2. 挑战与技术障碍分析
本节详细分析了UGV-UAV整合的主要挑战,分为通信问题、网络安全挑战、传感器融合与数据集成、环境与操作约束以及实时不确定性。这些挑战是整合的核心障碍,论文通过文献综合和实例进行了深入探讨。
2.1 通信问题
通信问题是整合的首要挑战。UGV通常依赖地面通信(如Wi-Fi或蜂窝网络),而UAV使用卫星或空对地特定技术,导致协议不兼容(如ROS用于UGV,MAVLink用于UAV)。这种差异造成数据流瓶颈、丢包或完全失败。环境变量(如城市密集基础设施中的信号干扰)加剧了问题:UAV使用高频段(2.4 GHz或5 GHz)适合开放空域,但UGV在障碍地形中受益于低频段(亚1 GHz),牺牲数据速率。实时操作(如搜索救援中的视频传输)需要标准化、自适应协议。论文提出URP作为解决方案,它封装ROS和MAVLink,并利用区块链确保安全通信。此外,网状网络设计差异(UAV用分层网络,UGV用去中心化拓扑)增加了延迟和通信丢失风险。软件定义网络(SDN)和ROS2 DDS等中间件被建议为潜在解决方案。
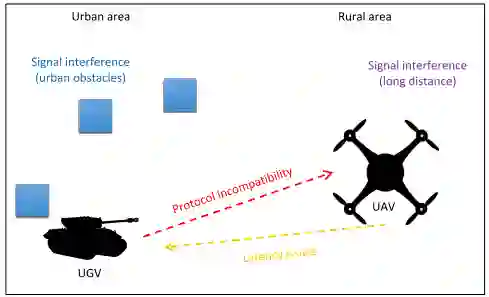
图:直观展示了UGV和UGV在操作环境中的通信挑战,突出了干扰和协议不兼容性在城市环境中尤为严重。
2.2 网络安全挑战
网络安全是另一关键问题,源于无线通信和自主系统的依赖性。主要威胁包括信号干扰(故意阻塞通信频率)、未经授权访问(通过弱加密截取敏感信息)和欺骗(如GPS欺骗误导导航)。这些风险在军事或灾难响应等高安全性任务中尤为严重。现有多种网络安全措施:基本加密成本低但易受高级攻击;跳频扩频(FHSS)抗干扰但实现复杂;区块链提供防篡改通信,但计算资源需求高;量子密钥分发(QKD)理论上不可破解但成本极高。区块链技术通过去中心化账本确保数据完整性,而QKD代表了未来方向。论文强调,需要多层次策略,包括加密、区块链和实时入侵检测,以增强系统韧性。
2.3 传感器融合与数据集成
传感器融合对于创建统一环境理解至关重要,但UGV和UAV使用不同传感器(如UGV的LiDAR和UAV的光学/热传感器),数据格式和处理标准各异,导致同步问题。计算需求高,实时处理困难,且传感器精度、分辨率和视场差异阻碍连贯地图构建。论文描述了预处理步骤(如降噪和标准化)以及融合算法(如卡尔曼滤波和深度学习),以整合多模态数据。下图展示了传感器融合流程,包括数据采集、预处理、融合和统一环境地图生成。挑战包括数据同步、计算开销和环境因素(如天气影响)。AI和语义数据模型被提出作为改进手段。
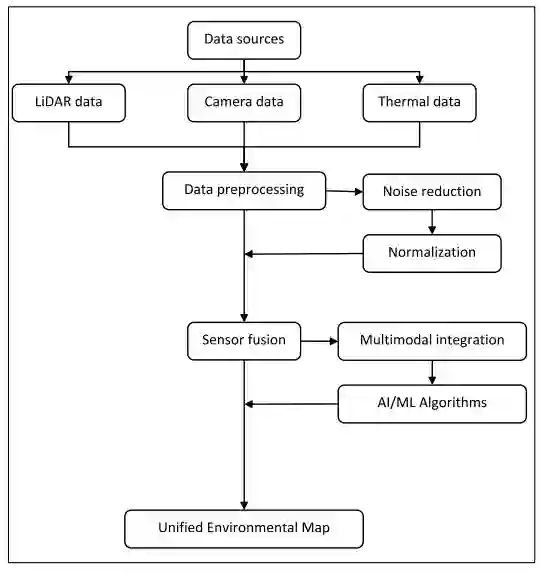
图:传感器融合流程
2.4 环境与操作约束
环境因素显著影响性能:UAV对恶劣天气(如大风、雨雾)敏感,影响飞行稳定性和传感器精度;UGV面临地形挑战(如崎岖地面),限制机动性。操作约束包括有限电池寿命:UAV续航短,UGV在重载或复杂地形中能耗增加。下表比较了UGV和UAV的操作约束,例如UGV在稳定条件下续航长,但地形适应性差;UAV敏捷但天气敏感。互补部署可提升任务效率。案例显示,在灾害响应中,UAV快速勘察,UGV地面干预,但电池技术需进步以延长操作时间。
| 方面 | 无人地面车辆 | 无人机 | 来源 |
|---|---|---|---|
| 地形挑战 | - 在崎岖、不平或泥泞地形上行动困难 - 易受岩石、树木和斜坡等障碍物影响 |
- 地形不相关,因无人机在空中操作 - 在密闭区域或茂密森林冠层中可能面临困难 |
[2] |
| 天气敏感性 | - 除非极端天气(如洪水、大雪),否则受天气条件影响较小 - 地面能见度和牵引力至关重要 |
- 对风、雨、雪高度敏感 - 恶劣天气影响飞行稳定性、安全性和传感器性能 |
[61, 62] |
| 能源限制 | - 通常由电池或燃料提供动力 - 在困难地形或陡坡上能耗增加 |
- 由于推进和悬停能耗高,电池续航有限 - 太阳能无人机在晴朗条件下可延长操作时间 |
[13, 63] |
| 操作时长 | - 在平坦、稳定地形上可工作较长时间(数小时) - 在挑战性地形上,因功耗需求增加,工作时长缩短 |
- 电池供电的无人机通常工作时长较短(30分钟至数小时) - 可通过系留供电系统或优化飞行路径来延长 |
[64, 65] |
| 有效载荷能力 | - 比无人机具有更高的有效载荷能力 - 可运载重型设备、传感器或补给品 |
- 由于重量限制,有效载荷能力有限 - 影响飞行时间和敏捷性 |
[66] |
| 环境条件 | - 除极端温度和洪水外,在大多数环境中表现良好 - 沙子、泥浆和积雪会阻碍移动 |
- 易受恶劣天气条件、高海拔和电磁干扰的影响 - 高湿度可能影响敏感电子设备 |
[53, 67] |
| 导航限制 | - 需要精确地图以避开障碍物 - GPS信号在密集城区或森林中可能受阻 |
- 依赖清晰的GPS信号进行导航 - 在GPS拒止区域或信号干扰严重的地区可能无法有效工作 |
[68] |
2.5 实时不确定性
实时操作面临内部(如传感器噪声、电池退化)和外部不确定性(如风切变、动态障碍),以及参数(如质量变化)和非参数不确定性(未建模动态)。这些因素导致任务漂移、能耗增加或碰撞风险。Pham等人采用自适应控制框架和Khan的模型预测控制作为解决方案,强调学习型去中心化策略增强韧性。管理不确定性对安全可靠性至关重要,尤其在灾害响应等动态环境中。
3. 新颖解决方案提案
本节提出了解决上述挑战的创新方案,包括统一机器人协议(URP)、模块化载荷系统、AI与集群智能以及现有系统集成。这些方案基于新兴技术,旨在提升互操作性、安全性和适应性。
3.1 统一机器人协议(URP)
URP是核心贡献,是一个混合通信框架,桥接ROS和MAVLink生态系统,支持实时数据传输和同步。它集成区块链技术确保防篡改通信,并通过多线程处理降低延迟。下图展示了URP架构,包括UGV、UAV和区块链节点间的交互。URP在速度、可靠性、安全性、互操作性、可扩展性和灵活性上优于传统协议(下表)。例如,URP优化低延迟通信,而ROS可能有延迟;区块链增强安全,而MAVLink仅提供基本加密。URP的模块化设计使其适用于复杂任务,如军事行动。
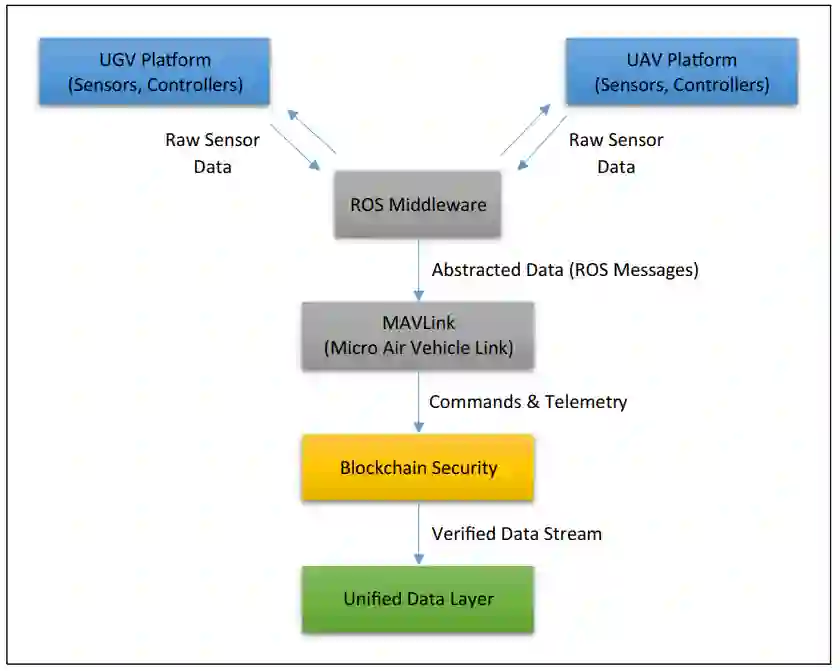
图:统一机器人协议(URP)的体系结构,显示UGV、UAV和区块链技术之间的交互
表:URP 与传统通信框架(ROS 对比 MAVLink)比较,突出其在速度、安全性与可靠性方面的优势
| 评估因素 | 统一机器人协议 (URP) | ROS (机器人操作系统) | MAVLink 协议 |
|---|---|---|---|
| 速度 | - 为 UGV 与 UAV 之间的低延迟通信而优化 | - 可能因数据抽象开销而产生延迟 | - 作为一种轻量级协议,为实时通信而优化,但其主要设计面向 UAV,在与 UGV 集成时可能限制速度 |
| 可靠性 | - 融入多线程和异步数据处理,以实现更快的响应时间 - 在具有挑战性的环境中,通过冗余机制和故障转移协议处理通信,确保持续的数据交换 - 不适用于 UGV 和 UAV 之间的高速、实时控制 |
- 可靠性在数据密集型应用中可能表现不一 - ROS 通常依赖于底层网络设置,其核心本身缺乏原生的故障转移或冗余功能 |
- 针对 UAV 特定操作可靠,但在复杂的多平台协调中可能遇到困难 |
| 安全性 | - 集成区块链技术,确保数据完整性、验证和安全的指令传输 | - ROS 缺乏原生安全特性,依赖外部工具和中间件进行加密与身份验证 - 其基本形式易受基于网络的攻击 |
- MAV Link 为安全通信提供基本加密 |
| 互操作性 | - 在 UGV 和 UAV 生态系统之间实现无缝通信 - 支持 ROS 和 MAVLink 消息格式的实时翻译 |
- 主要为基于 ROS 的系统设计,与其他框架的互操作性需要定制桥接或中间件 - 在异构平台(如 UGV-UAV 组合)中集成可能具有挑战性 |
- 专为 UAV 设计,在与非 UAV 系统(如 UGV)集成时可能需要额外的适配层 |
| 灵活性 | - 模块化设计,支持与新兴技术(如区块链、AI驱动协调)轻松集成 - 可适应各种任务和硬件配置 |
- 高度可定制,但需要大量配置和编码才能与 UAV 特定协议(如 MAVLink)集成 - 灵活性取决于开发者的专业知识 |
- 专为 UAV 通信量身定制,灵活性有限,特别是在扩展到 UGV 或其他机器人平台时 |
| 资源效率 | - 在 UGV 和 UAV 之间优化资源使用,平衡计算、通信和能耗 | - 由于中间件开销,可能消耗大量计算资源,尤其是在大规模、多机器人设置中 | - 作为一种轻量级协议,对 UAV 的资源效率高,但在跨 UGV-UAV 平台使用时,优化可能不足 |
3.2 模块化载荷系统
模块化载荷系统允许UGV和UAV快速重新配置载荷,以适应不同任务(如监视、交付、侦察)。UGV可交换机械臂或传感器,UAV可切换相机或太阳能板,提升操作灵活性。下图展示了UGV和UAV的模块化载荷可能性,如UAV搭载热像仪,UGV运载货物。下表比较了模块化系统与单用途载荷:模块化初始成本高但长期成本效益好,支持多种任务,减少停机时间;单用途优化性能但缺乏适应性。模块化系统在灾害响应等动态环境中价值显著,可通过标准化接口实现“即插即用”。
图:UGV和无人机的模块化有效载荷系统,说明了每个平台具有可互换工具和传感器的灵活性
表:模块化有效载荷系统与一次性有效载荷的比较,强调成本效益、操作灵活性和任务成功率
| 评估标准 | 模块化系统 | 一次性载荷 |
|---|---|---|
| 初始成本 | 较高,因需要模块化硬件和接口 | 较低,组件专为特定用途定制 |
| 操作灵活性 | 非常高:可通过更换有效载荷适应多种任务 | 有限:受限于原始设计用途 |
| 任务多样性 | 可执行多种角色(如监视、投送、侦察) | 每单元限单一角色,执行不同任务需多个平台 |
| 有效载荷集成 | 即插即用的模块化设计简化了更换;标准接口便于集成 | 固定有效载荷,变更需定制或重建 |
| 维护成本 | 长期较低:共用部件简化了维修和备件库存 | 较高,因需独特部件和特定设计的备件 |
| 部署速度 | 高:模块化设计支持现场快速重新配置 | 较慢:执行不同任务可能需要部署独立系统 |
| 系统重量 | 通常较重,因需模块化连接器和通用兼容性设计 | 更轻,为单一用例优化设计 |
| 能效 | 略低,因模块化系统可能承载未使用的容量 | 针对特定任务更高,因载荷设计经过优化 |
| 可升级性 | 优秀:模块化允许升级而无需更换整个系统 | 差:升级通常需要完全更换或重新设计 |
| 可扩展性 | 高:模块化通过标准化部件支持机队扩展 | 可扩展性有限,因采用定制化设计 |
| 任务停机时间 | 极短:快速更换有效载荷缩短任务间隔时间 | 较长:需要单独载具或手动重新配置的停机时间 |
| 单类任务成本 | 较低:共享平台用于多样化任务时降低成本 | 较高:每项独特任务都需要新系统 |
| 长期投资回报率 | 高:成本可分摊到广泛的任务范围和更长的生命周期 | 较低:频繁更换或额外采购增加了开支 |
| 实例 | 无人机:大疆Matrice系列;无人车:Milrem THeMIS | 无人机:大疆Phantom;无人车:固定用途的排爆机器人 |
3.3 AI与集群智能用于任务分配
AI和集群智能实现去中心化任务分配,允许多个UGV和UAV自主协作。例如,在灾害区域,UAV用AI识别幸存者,UGV自动交付物资。集群算法受生物系统(如蚁群)启发,通过本地规则优化集体行为。下图展示了集群智能任务分配流程:UAV侦察环境,UGV执行地面任务,通过点对点通信动态协调。AI算法(如强化学习)增强实时决策。论文引用高级控制策略(如量化迭代学习控制)展示进步,但指出需扩展至异构团队。
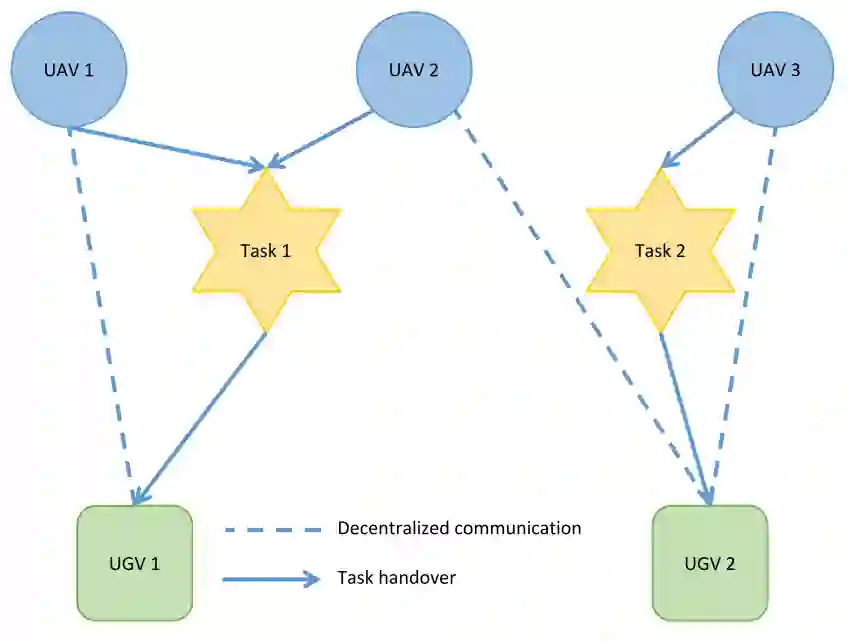
图:UGV-UAV系统中的群体智能任务分配说明了多个智能体之间的分散协调
3.4 现有系统集成
集成现有系统(如Android团队感知工具包ATAK)可通过翻译模块协调不同协议,提升互操作性。下图展示了ATAK在UGV-UAV集成中的角色,作为共享接口传输数据。优势包括减少延迟和增强态势感知,但挑战有数据同步、高带宽管理和安全。区块链可集成以保护通信。这种集成支持可扩展操作,但需解决网络安全问题。
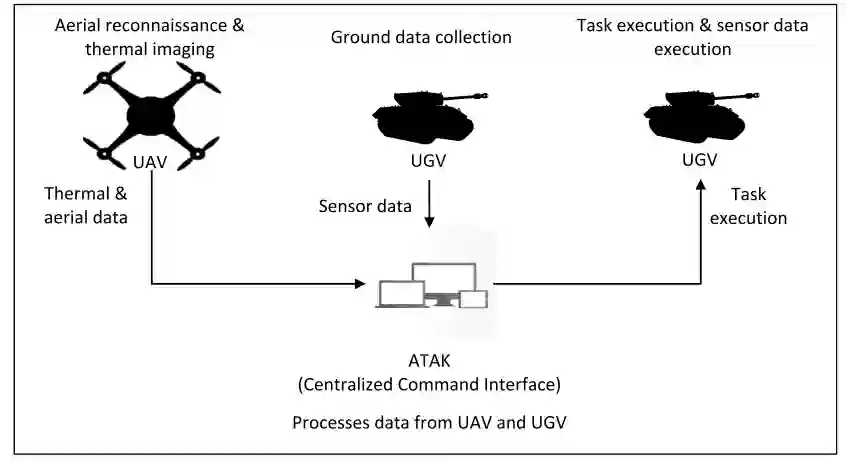
图:使用ATAK的UGV-UAV集成
4. 现实应用与案例研究
本节通过案例研究展示UGV-UAV整合的实际应用,涵盖军事行动、灾害响应和监视监控,验证了解决方案的有效性。
4.1 军事行动
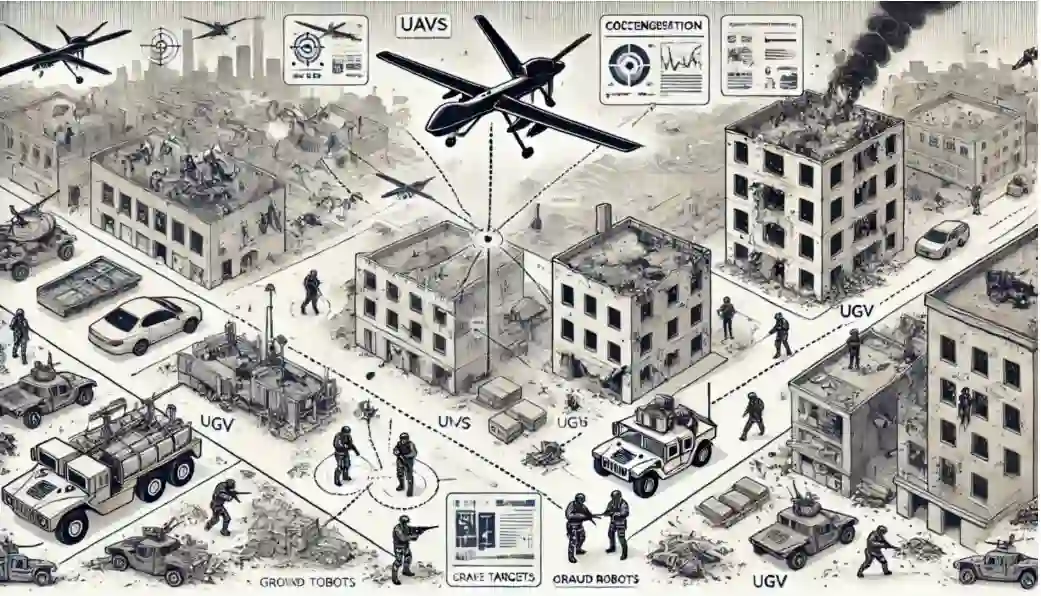
在城市作战演习中,UAV提供空中侦察和实时视频,UGV交付物资或中和威胁,提升态势感知并降低人员风险。下图展示了UAV和UGV在城市环境中的协调:UAV侦察,UGV地面行动。挑战包括通信延迟,URP等协议可改善。案例证明整合能缩短响应时间,但需进一步优化同步。
4.2 灾害响应
在Emilia Romagna地震案例中,UAV评估教堂塔结构损伤,UGV检查内部文物,实现全面评估。下表比较了UAV和UGV在灾害响应中的角色:UAV快速空中调查,但续航有限;UGV地面干预,但机动性差。整合提高效率,但电池寿命和地形限制需先进电池技术解决。模块化载荷允许快速适配,如UAV切换热像仪定位幸存者。
表6 无人机与无人地面车辆在灾害响应中的角色对比
| 场景 | 无人机 (UAV) | 无人地面车辆 (UGV) | ||||
|---|---|---|---|---|---|---|
| 角色 | 优势 | 限制 | 角色 | 优势 | 限制 | |
| 空中勘测 | 对受灾区域进行快速测绘与航空成像 | 快速覆盖大片区域,不受地面障碍物影响 | 电池续航有限;受恶劣天气条件影响 | 不适用于空中勘测 | 不适用 | 无法执行空中任务;依赖无人机数据进行地形分析 |
| 废墟清理 | 在废墟清理中作用极小或无作用 | 不适用 | 无法与物理障碍物交互;有效载荷能力有限 | 配备机械臂的无人地面车辆可清理废墟、移动重物 | 可在恶劣条件下操作,并能物理操控环境 | 在极度崎岖地形中机动性有限;大范围覆盖速度慢于无人机 |
| 幸存者救援 | 通过热成像识别幸存者并传递其位置 | 可从安全高度快速识别;不受地形影响 | 与幸存者交互有限;可能在密集障碍物中遇到困难 | 可向幸存者运输补给,或将其从危险区域转移 | 可提供物理援助,例如运送幸存者或补给品 | 操作速度有限;在复杂地形中可能遇到困难 |
| 搜索与侦察 | 侦察安全路径、危险区域和可通行路线 | 快速探索大片区域;可绕过水体或悬崖等障碍 | 可能遗漏地面细节或无法进入受限空间 | 在地面验证无人机侦察信息并确认危险 | 地面验证提高了准确性,并能适应动态变化 | 侦察速度较慢;受实际地形挑战限制 |
| 物资投送 | 投送小型、轻量包裹(如药品、通讯设备) | 在复杂地形上投送更快;可绕过道路封锁 | 受有效载荷能力和天气条件限制 | 投送较重的物资,如食物、水或医疗设备 | 有效载荷能力更强;在危险环境中投送更安全 | 速度慢于无人机;受地形可通行性限制 |
| 环境监测 | 从空中监测空气质量、气体泄漏或辐射水平 | 可快速进行高层级监测,无需人员亲临险境 | 仅限于空中测量;对地面状况的准确性较低 | 执行地面层级的环境采样与检测 | 可在危险环境中进行精确的地面层级数据收集 | 传感器范围有限;在危险区域受地形限制 |
4.3 监视与监控
在边境巡逻中,UAV监视大面积区域,UGV近距离检查,资源分配高效。下图展示了监视流程:UAV广域覆盖,UGV局部行动。挑战包括信号干扰,URP和混合控制系统可增强协调。应用显示整合在基础设施监测中的潜力。
5. 新兴技术与未来方向
本节探讨了区块链、量子计算和先进电池技术等新兴技术,这些有潜力进一步推动整合。
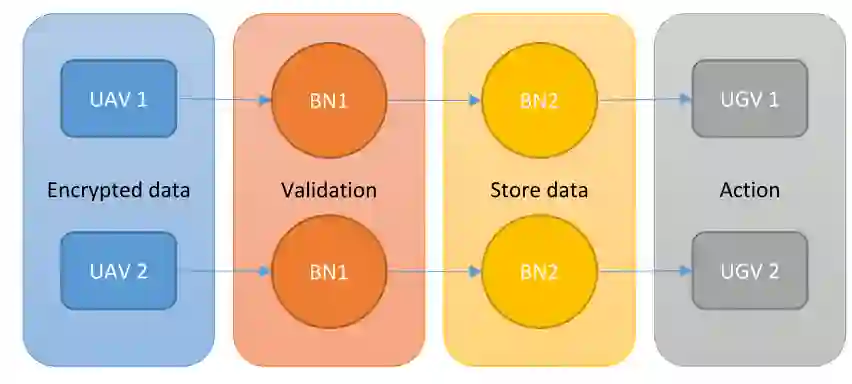
5.1 区块链用于安全通信
区块链通过去中心化账本确保通信安全,防止数据篡改。在UGV-UAV系统中,区块链记录交易,提供可追溯性和透明度。下图展示了区块链框架:节点验证数据,增强信任。对比传统协议,区块链安全性高但延迟高,适用于高安全性任务。量子密钥分发(QKD)是未来方向,提供不可破解加密。
5.2 量子计算用于任务优化
量子计算利用量子并行性,快速解决复杂优化问题(如路径规划)。对比量子与经典算法:量子算法处理时间快、精度高,适合大规模协调。但实现复杂,当前限于专业领域。建议将其用于动态任务分配。
5.3 先进电池技术
电池寿命是限制因素。先进技术如固态电池(能量密度高、循环寿命长)和锂硫电池可延长续航。电池技术:固态电池能效高,钠离子电池环保。能量收集(如UAV太阳能板)减少充电需求。这些技术提升操作可持续性,对长期任务关键。
6. 结果与关键发现
基于六项评估指标,关键发现包括:互操作性是主要瓶颈,URP有效桥接协议;实时通信需分层网状网络;传感器融合AI算法有潜力但处理受限;集群智能提升自主性;模块化载荷增强效率;区块链和QKD保障安全。结果表明,系统级框架优于组件优化,URP和AI协调具有变革潜力。

